走行
走行のためのNotebook
走行で使えるnotebookは、road_following.ipynbとroad_following_live.ipynbの2つが存在しています。
| Notebook | 内容 |
|---|---|
| road_following | 映像を表示せずに、デモ走行 |
| road_following_live | 映像が転送され映像を確認しながらデモ走行(映像転送遅延に注意) |
road_following_live
road_following_liveは、映像を見ながら、走行が可能です。映像遅延が発生する場合は、うまく走行できない場合もあるので、認識の確認等での用途で使用する感じになります。
カメラの終了
下記処理をNotebookに追加して、必ず実行してください。実行しないと、interactive_regressionでカメラの読み込み時に、エラーが発生します。
1 2 3 4 | |
road_following
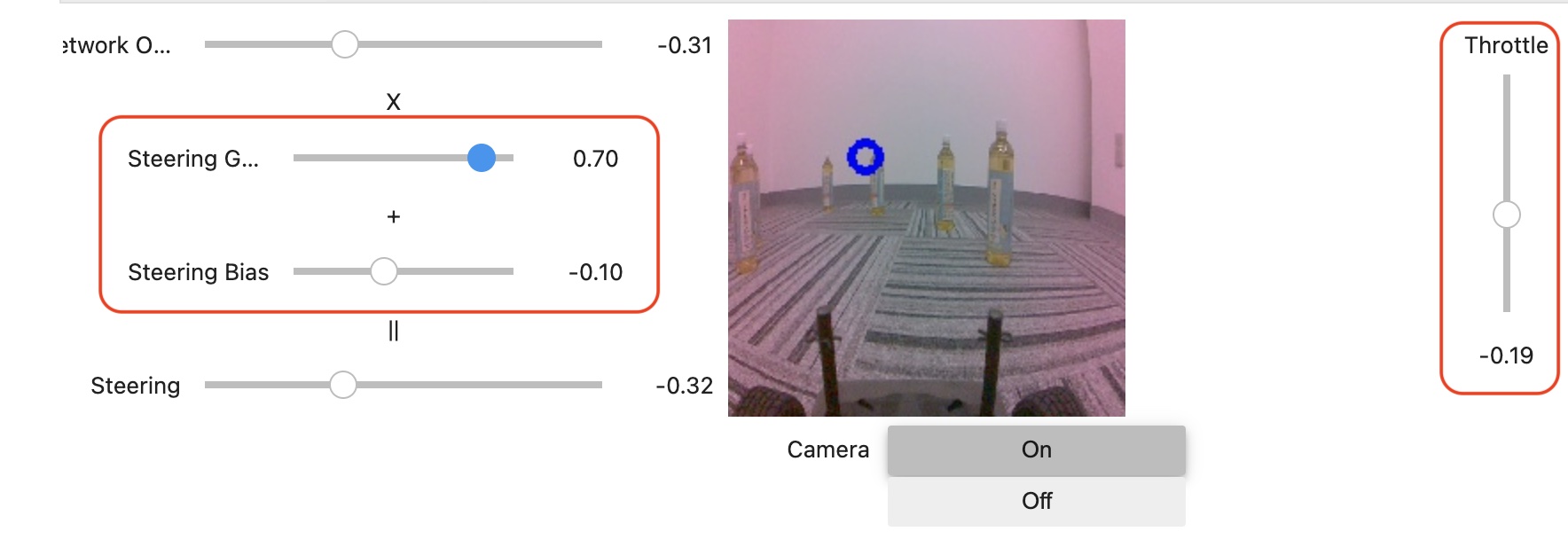
road_followingは初期のjetracerから提供されている走行用のnotebookです。TensorRTに変換された学習済みモデルにカメラ映像を流し込み、steeringの角度を推論します。各種値は、STEERING_GAIN,STEERING_BIAS等で調整します。04_road_following.ipynbでは、バイアス、ゲインは、タミヤRCカー向けに調整済みです。
1 2 3 4 5 6 7 8 9 10 11 | |
カメラの終了
下記処理をNotebookに追加して、必ず実行してください。実行しないと、interactive_regressionでカメラの読み込み時に、エラーが発生します。
1 2 3 4 | |