受信機信号計測


概要
実際のRCカー受信機の信号をもとに自動でアノテーション作業(オートアノテーション)を実行するようにします。(11_record_camera.ipynb)
RCカーは、プロポ(送信機)から受信機で信号を受信し、ステアリング信号(ST)とスロットル信号(TH)でRCカー制御していますが、その受信機から出ている2つのPWM信号を計測します。 信号の周期は約60Hz、波長は、おおよそ1000μ秒〜2000μ秒になります。
Danger
作業台に置いて必ず実行してください。
Info
コントロール基板 #6112 JetRacer Rev 2.0.9以降の基板のみ対応
Info
Connectボタンを押すと下記のエラーが出る時がございます。
Traceback (most recent call last): File "/usr/lib/python3.8/threading.py", line 932, in _bootstrap_inner
もし、その場合は本コードにある数字をお願いいたします。以下のコードの8の部分を12に変更してくださるようお願いいたします。
data1 = i2c.read_i2c_block_data(addr, 0x01, 8)を
data1 = i2c.read_i2c_block_data(addr, 0x01, 12)に変更して保存ボタンを押します。
計測方法
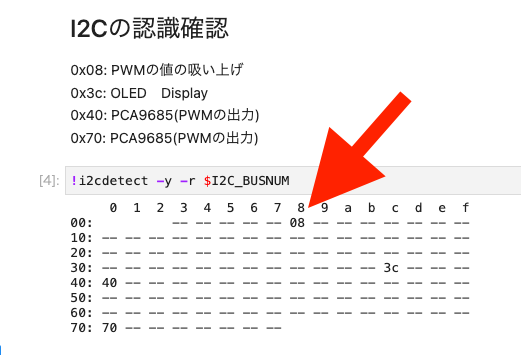
制御信号を計測しているのは、JetsonNanoではなく、コントロール基板のマイコンが受信機からの制御信号を計測しています。I2Cのデバイスアドレスは0x08になります。
事前にRCモードでトリム調整した走行が良い状態を維持し、設定後は、ステアリングトリム、スロットルトリム、リバーススイッチはなるべく動かさないようにしてください。

必ずJetRacerを作業台に設置し、プロポの後ろのボタンによりRCカーモード(赤色)に切り替えます。

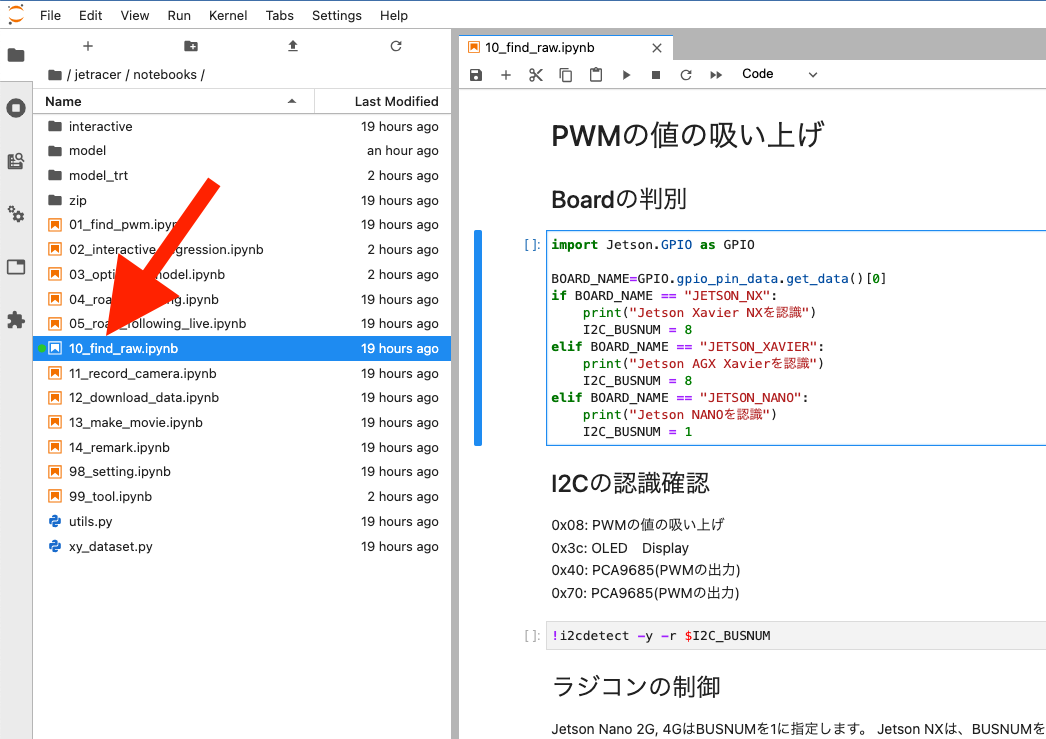
10_find_raw.ipynbを開ます。
ステアリング信号を計測
RCカー電源をONにして、プロポの電源もONにします。
Info
ピーピーと音が聞こえる場合は、ESC(アンプ)が制御信号を受信できてない時に音が鳴ります。
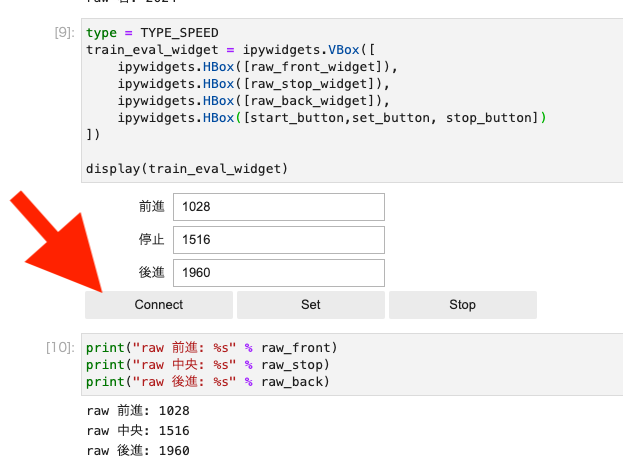
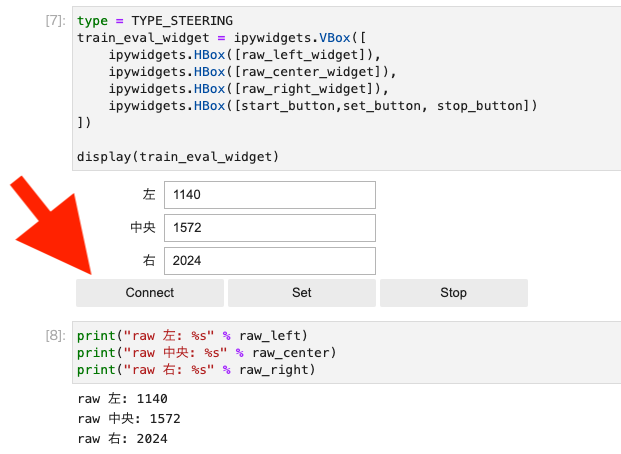
Connectボタンをクリックします。
プロポのステアリングを左にいっぱいに切り、計測します。

Setボタンをクリックします。
プロポのステアリングを中立にし、計測します。

Setボタンをクリックします。
プロポのステアリングをを右にいっぱいに切り、計測します。

Setボタンをクリックします。
スロットル信号を計測
プロポのレバーを引いて前進状態にして計測します。

Setボタンをクリックします。
プロポのレバーを離します。中立状態にして計測します。
Setボタンをクリックします。
プロポのレバーを前に引いて後進状態にして計測します。

Setボタンをクリックします。
計測されたデータはraw_params.jsonファイルへ記憶されます。実際、計測された数値が正しいか確認してください。
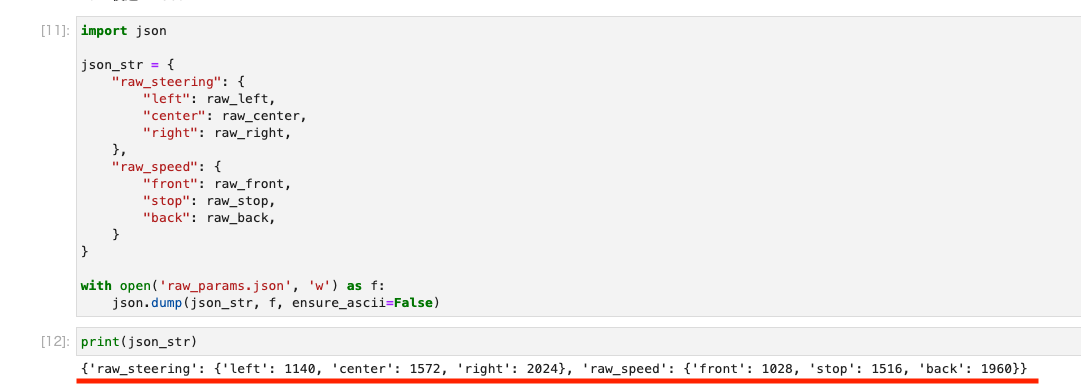
/home/jetson/jetracer/notebooksにraw_params.jsonファイルが生成されます。