#612 JetRacerコントロールボード
※動作環境 Jetson Nano(A-02,B-01) 開発者キットのみ
※受信機との接続は、爪なしのサーボケーブルが3本必要になります。
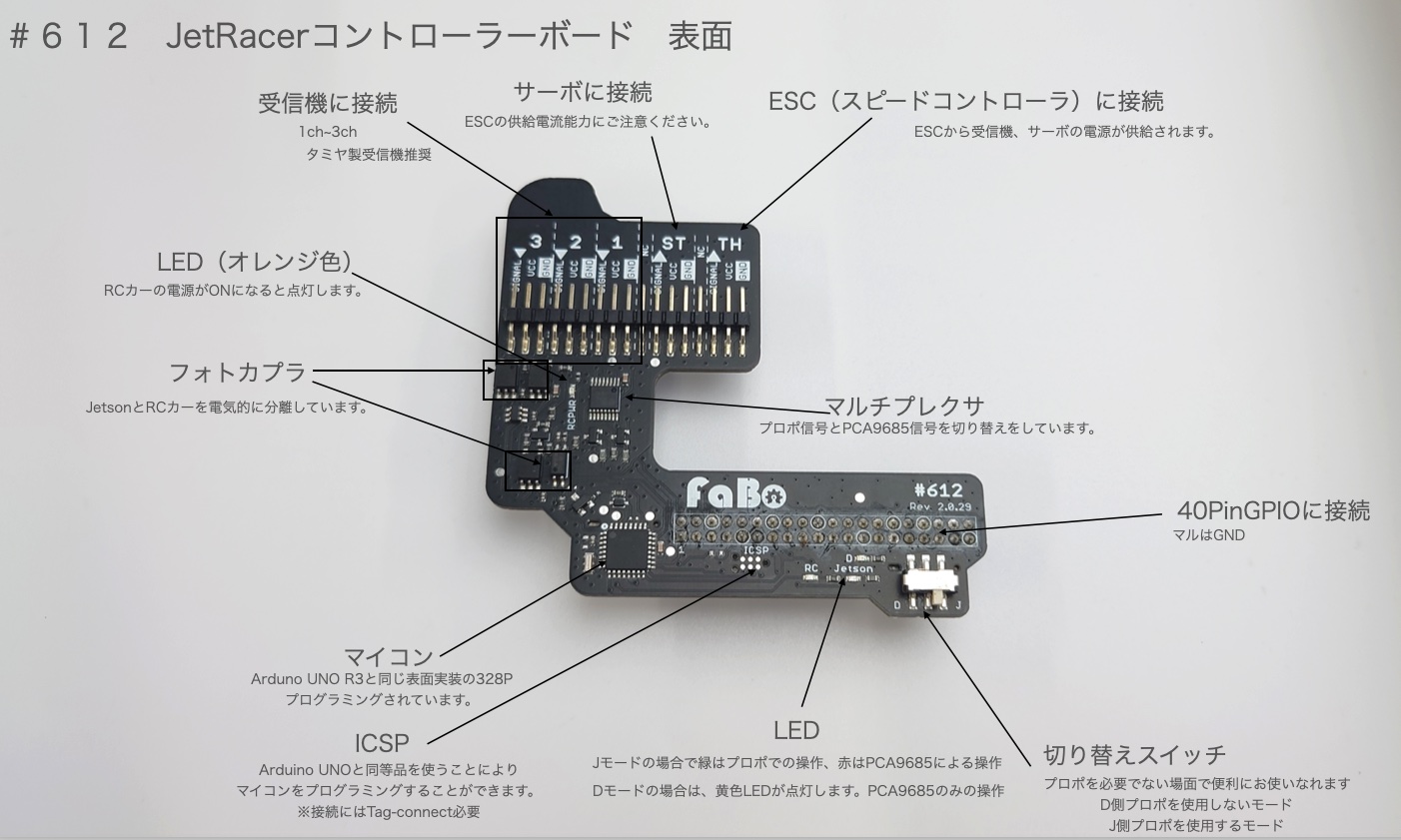
名称と役割
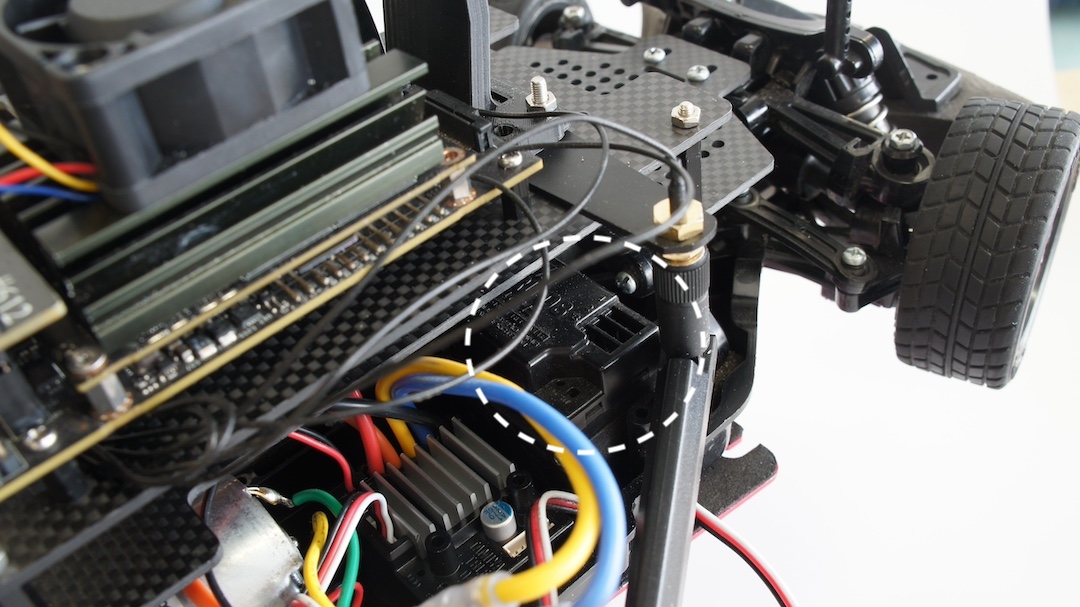
コントロールボード接続例
JetsonおよびRCカーの電源を停止して、以下のように接続します。
コントロール基板をJetsonの40ピンヘッダーに接続します。前後、左右ともにズレがないことを確認し、奥までしっかり接続します。
受信機を確認します。車体前方から1ch,2ch,3ch(B)になります。写真の方向の場合は、車体外側が黒(GND)、車体内側が白(信号線)
タミヤTRU-08の場合。上から1ch,2ch,B BのBATTは、3chとして使用します。3chのPWM信号波長が1500ミリ秒未満だった場合は、1500ミリ秒以上だった場合はAIモードになります。

受信機と3ピンとを繋ぐ、ケーブルが必要となります。
受信機にコネクタを刺し極性を間違いなく接続します。白 SIGNAL、赤 VCC、黒 GND ※弊社3ピンコネクタの場合
サーボからの3ピンのケーブルはSTへ接続、ESCからの3ピンのケーブルはTHに接続します。ズレなくかつ極性を間違えなく接続します。※信号線、極性に関してはそれぞれご使用のサーボまたはESC説明書をご確認ください。
サーボおよびESCからの3ピンコネクタは爪があるので1個空けて接続します
逆接続に注意
3ピンコネクタの逆接続は破損の原因となります。電源投入前に確認しましょう。
ブロック図
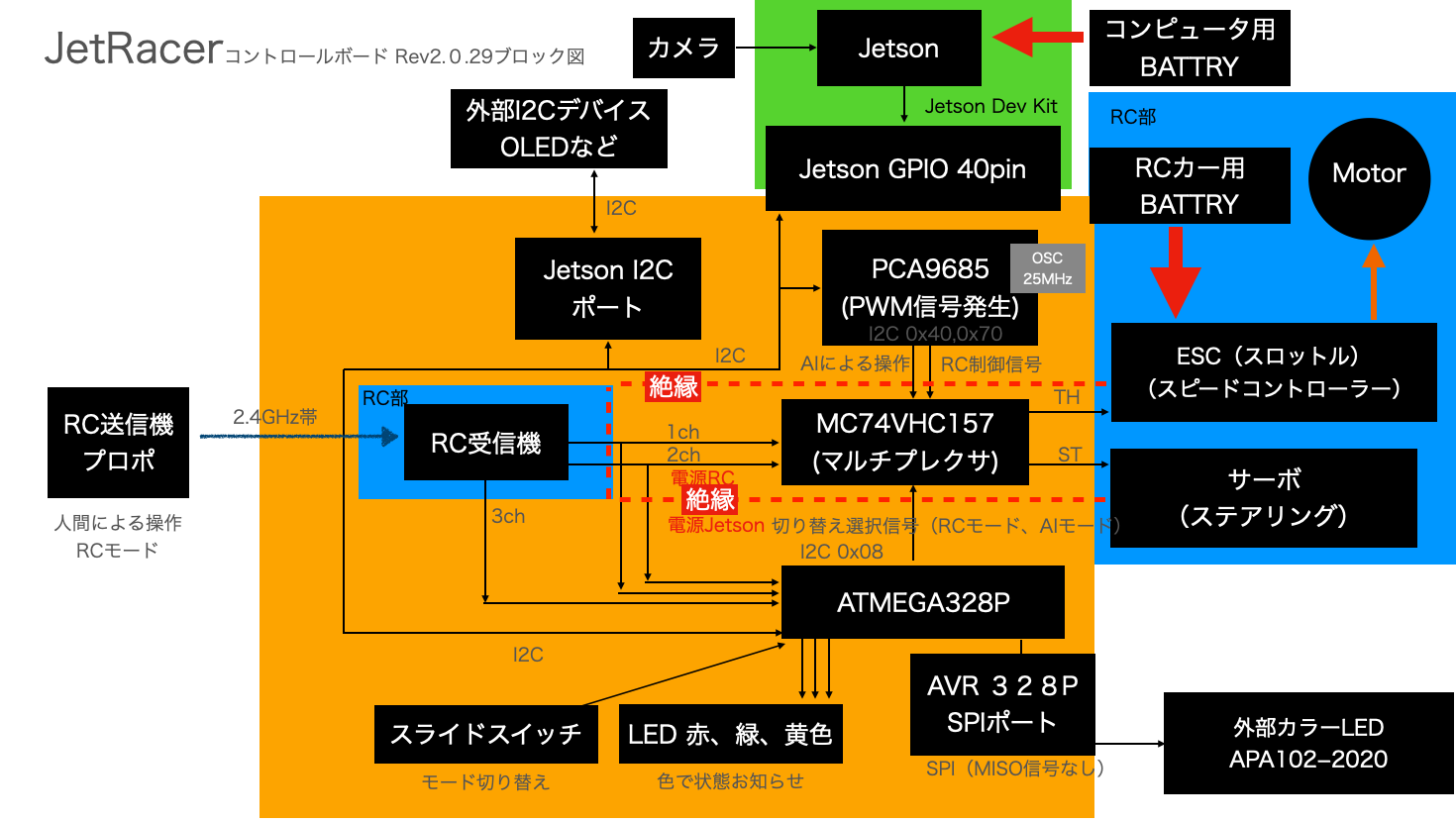
GNDに関して
RCのGNDとJetsonのGNDは接続されていませんのでご注意ください。
I/O
GNDは、JetsonとRCカーいずれも共通
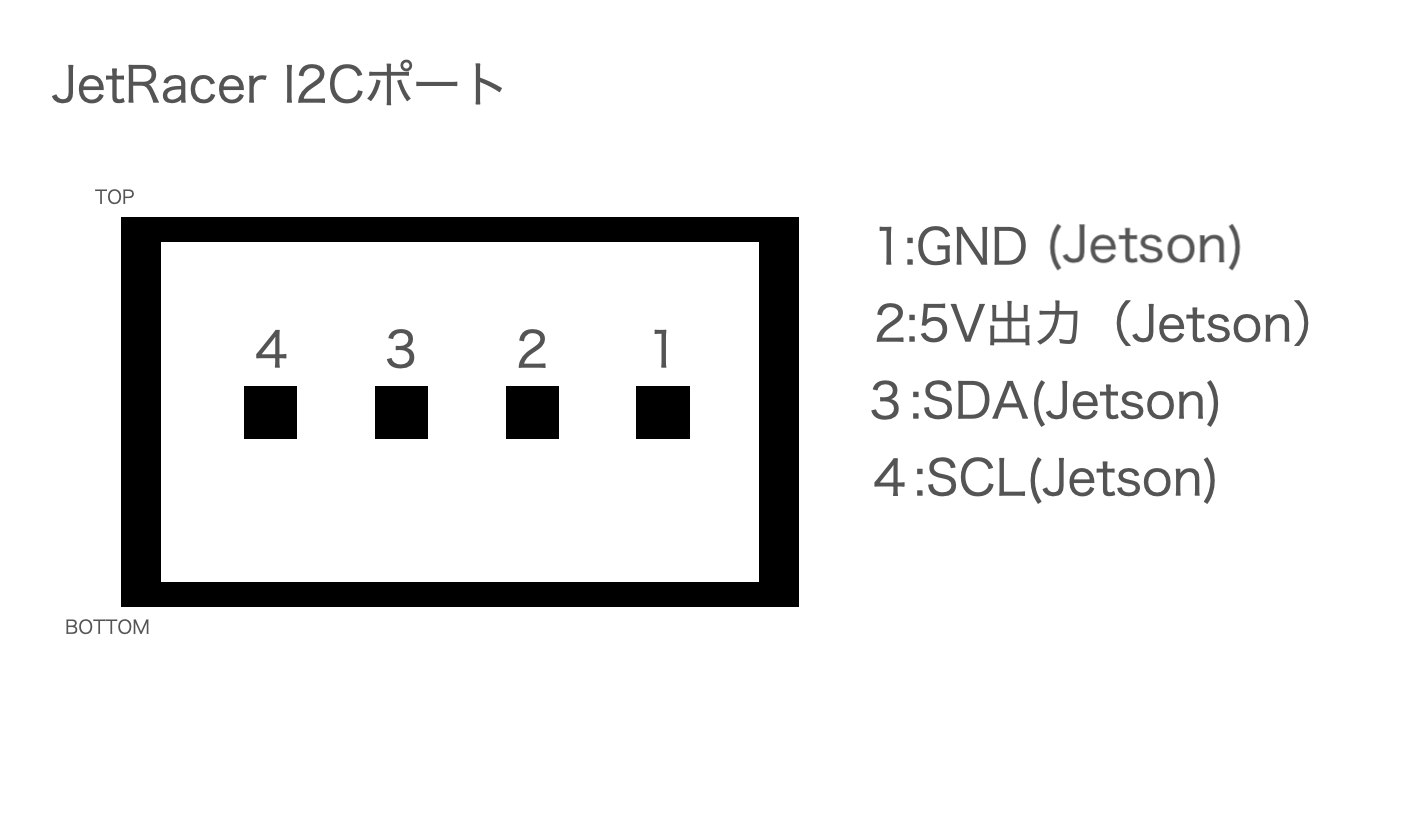
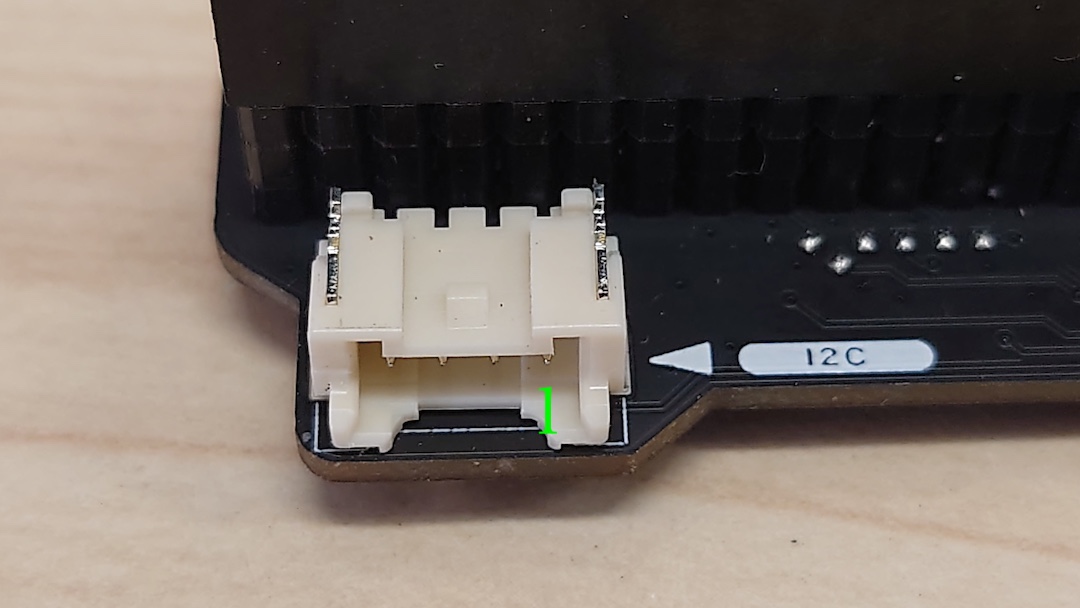
※SM04B-PASS-TBT(LF)(SN)使用
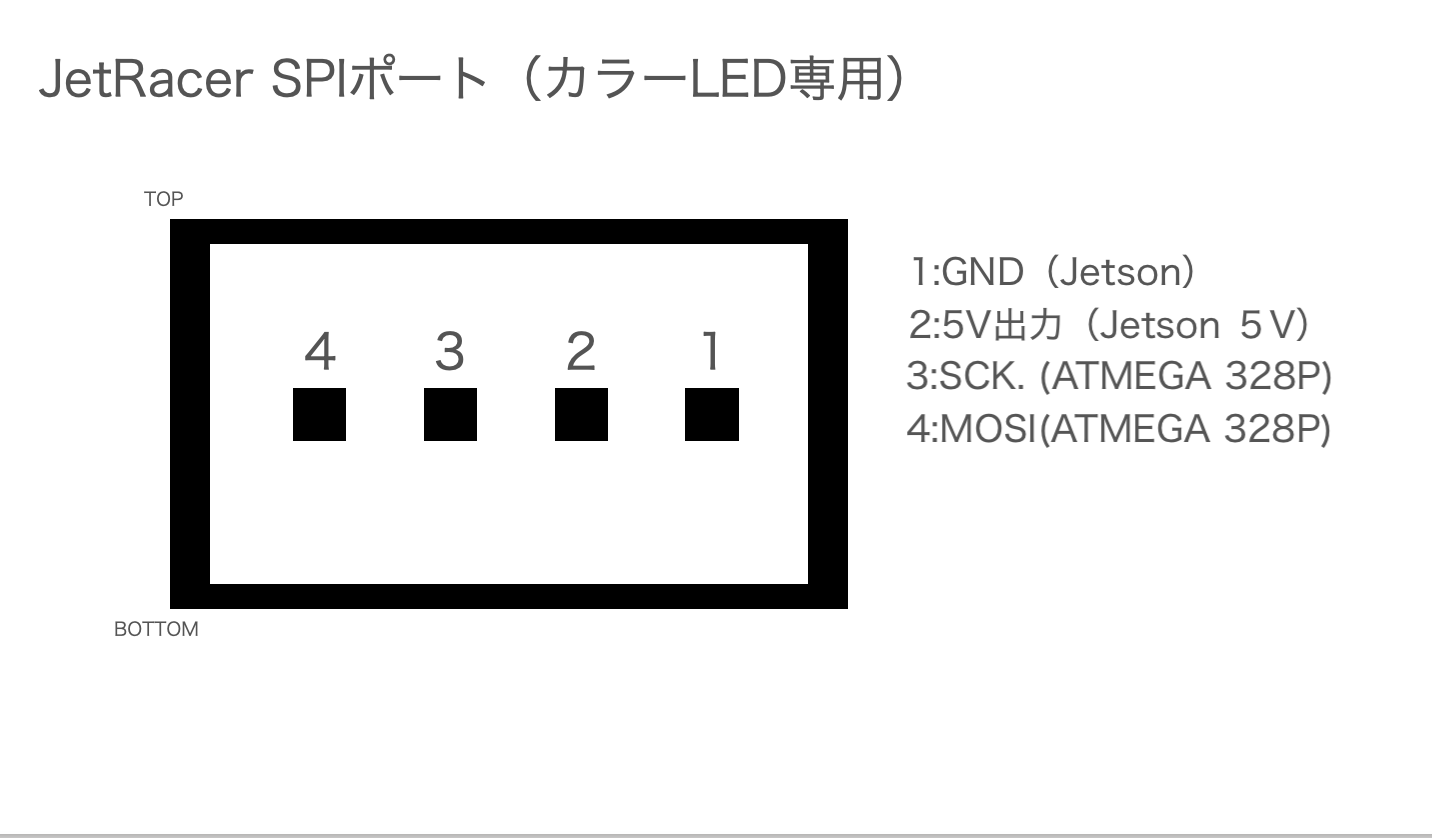
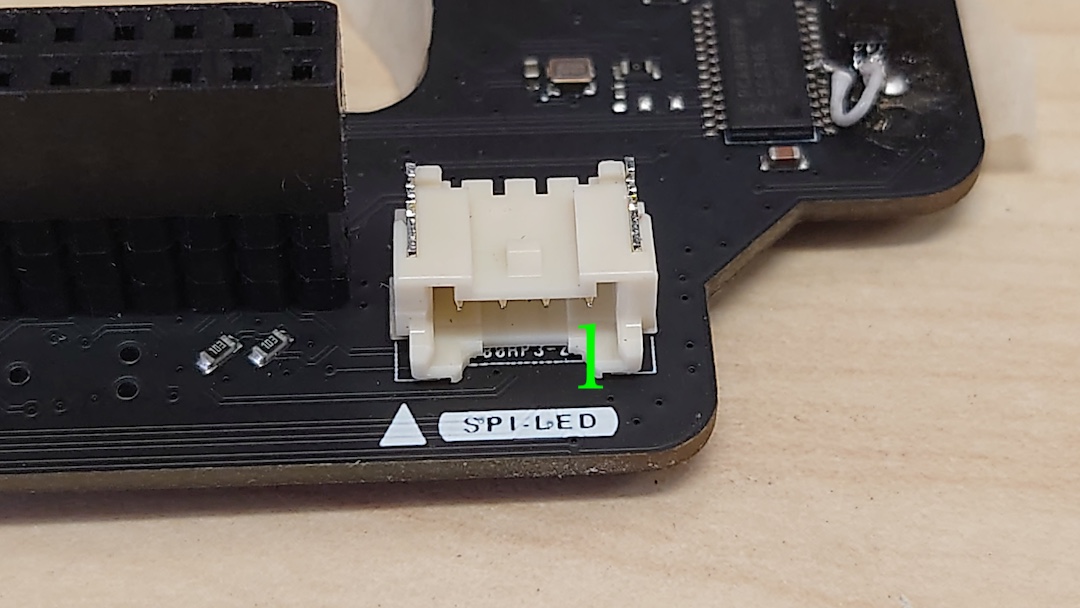
※SM04B-PASS-TBT(LF)(SN)使用
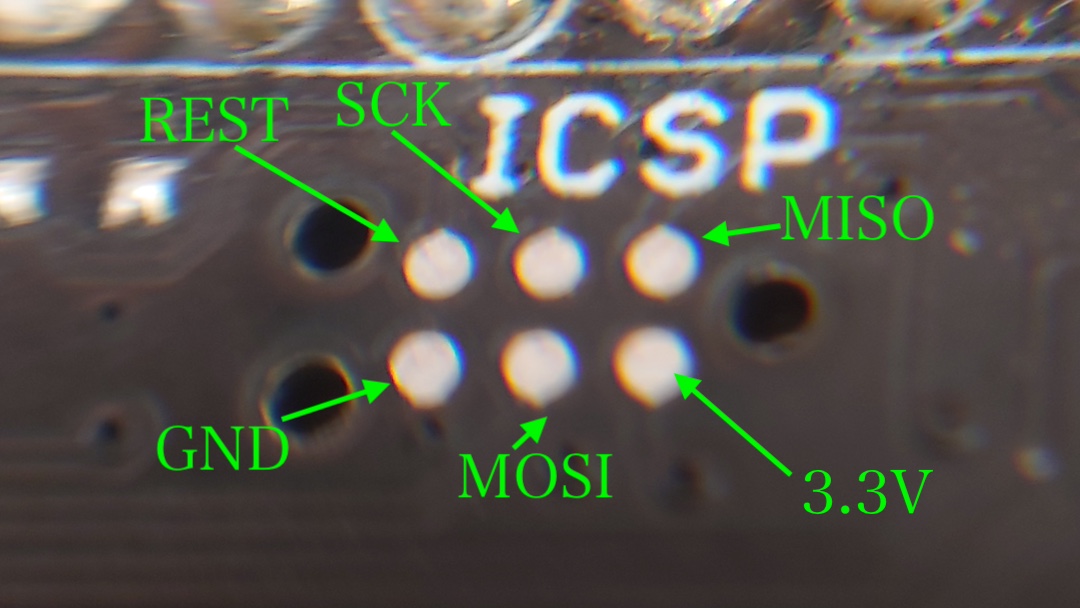
ファームウェアの書き換えは、ArduinoのISCPを使用し、書き込むArduino UNO同等品とTag-Connectが必要となります。
参考サイト
Arduino Bootloader
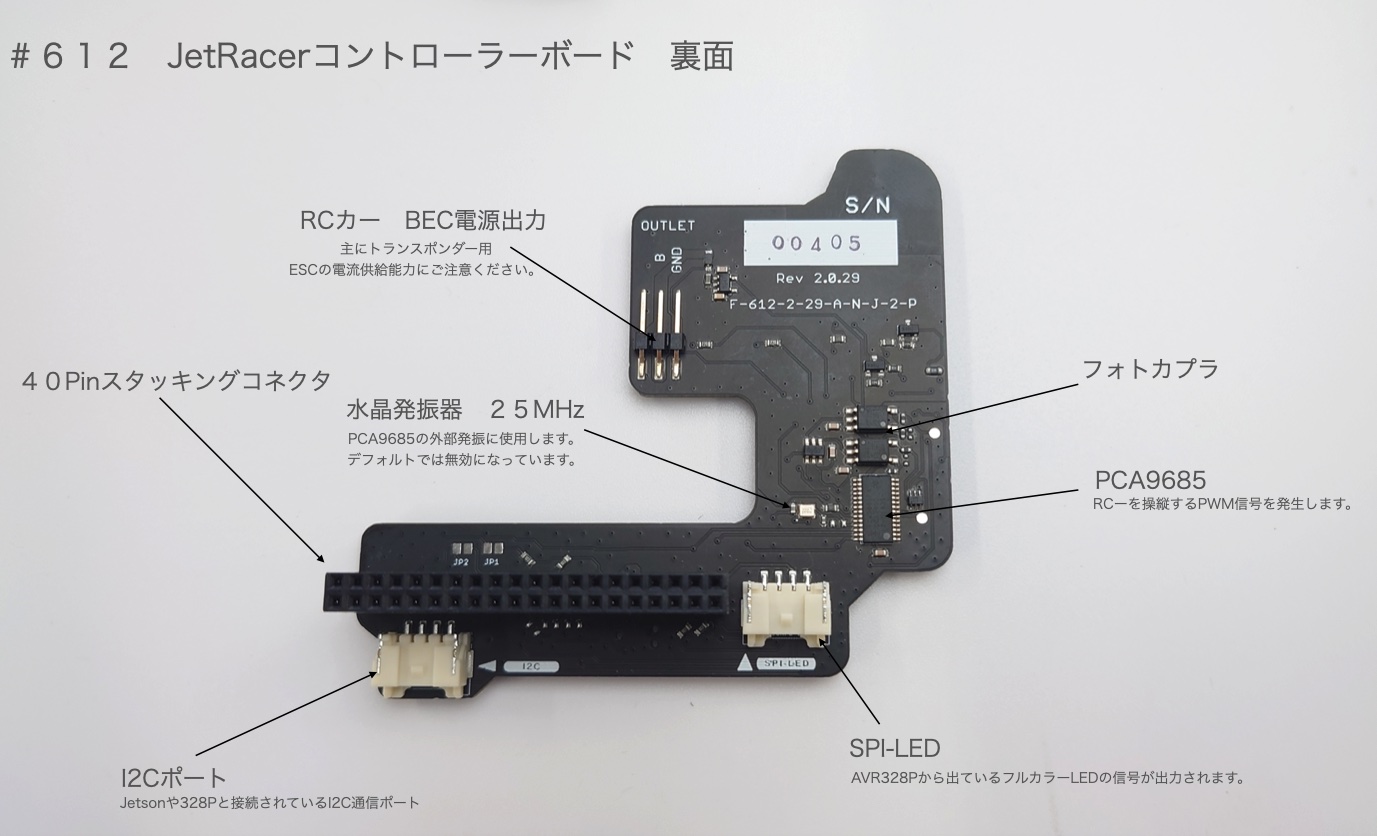
PCA9685の外部水晶発振器について
FaBoのコントロール基板にあるPCA9685のすぐ横に外部の水晶発振器25MHzがありこちらの発振を使用しますとPCA9685の内部発振器より周囲温度環境に影響を受けにくい正確な発振が得られます。
このことにより安定した中央値出力が可能になり車体にブレーキ信号からバック信号へ切り替えが容易になります。
一旦下記のコードを実行すると電源が切れるまで外部発振器が優先され内部発振には設定できません。ご注意ください。
サンプルコード
Fabo_PCA9685クラスをオーバーライドして組み込みます。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25 | import Fabo_PCA9685
class pca9685CLK(Fabo_PCA9685.PCA9685):
EXTCLK = 0x40
def Set_hz(self, hz):
self.PWM_HZ = hz
prescale=self.calc_prescale(hz)
'''
Hz設定。レジスタに書き込む値はprescaleの値となる
prescale = calc_prescale(hz)
'''
oldmode = self.bus.read_byte_data(self.PCA9685_ADDRESS,self.MODE1)
newmode = oldmode | self.SLEEP
# スリープにする
self.bus.write_byte_data(self.PCA9685_ADDRESS, self.MODE1, newmode)
# 外部発振を有効化する。(新規追加)
self.bus.write_byte_data(self.PCA9685_ADDRESS, self.MODE1, self.SLEEP | self.EXTCLK)
#周波数を設定
self.bus.write_byte_data(self.PCA9685_ADDRESS, self.PRE_SCALE, prescale)
#スリープを解除
self.bus.write_byte_data(self.PCA9685_ADDRESS, self.MODE1, oldmode)
time.sleep(self.WAIT_TIME)
# リスタートする(必須)
self.bus.write_byte_data(self.PCA9685_ADDRESS, self.MODE1, (oldmode | self.RESTART))
|
インスタンスのコード
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33 | import time
import pkg_resources
import smbus
import time
import json
INITIAL_VALUE = 375
pwm_center = INITIAL_VALUE
pwm_right = INITIAL_VALUE + 100
pwm_left = INITIAL_VALUE - 100
pwm_stop = INITIAL_VALUE
import Jetson.GPIO as GPIO
BOARD_NAME=GPIO.gpio_pin_data.get_data()[0]
if BOARD_NAME == "JETSON_NX":
print("Jetson Xavier NXを認識")
I2C_BUSNUM = 8
elif BOARD_NAME == "JETSON_XAVIER":
print("Jetson AGX Xavierを認識")
I2C_BUSNUM = 8
elif BOARD_NAME == "JETSON_NANO":
print("Jetson NANOを認識")
I2C_BUSNUM = 1
SMBUS='smbus'
BUSNUM=I2C_BUSNUM
SERVO_HZ=60
bus = smbus.SMBus(BUSNUM)
PCA9685 = pca9685CLK(bus,INITIAL_VALUE,address=0x40)
PCA9685.Set_hz(SERVO_HZ)
|
電圧レベル
本基板から出力されるPWMの電圧レベル(ST,TH)はBEC電圧になります。(約6V前後)