JetRacer Kit Race Edition JR2025シリーズ 組立て手順

【対象モデル】
| コード番号 | 名称 | TAMIYA TT-02 XB |
|---|---|---|
| JR2025-R | FaBo JetRacer Kit Race Edition | ◯ |
| JR2025-R-NV | FaBo JetRacer Kit Race Edition 車体なし | X |
RCカーのコンポーネント(本キットの場合)
タミヤ TT-02 エキスパートビルドのご使用の場合(通常版)
TT-02 XBは完成品ですのでRCは組み立て不要です。箱から取り出し、真っ直ぐ走るかを確認します。
詳しくはRCカーの取扱説明書ご覧ください。
送信機(プロポ)で前進、後退、停止を確認。ステアリング調整、スロットル調整し、RCカーとして初期動作を確認します。
動作確認できたら、RCカーの電源、プロポ電源ともに電源OFFにしてRCカーバッテリーを一旦取り外します。
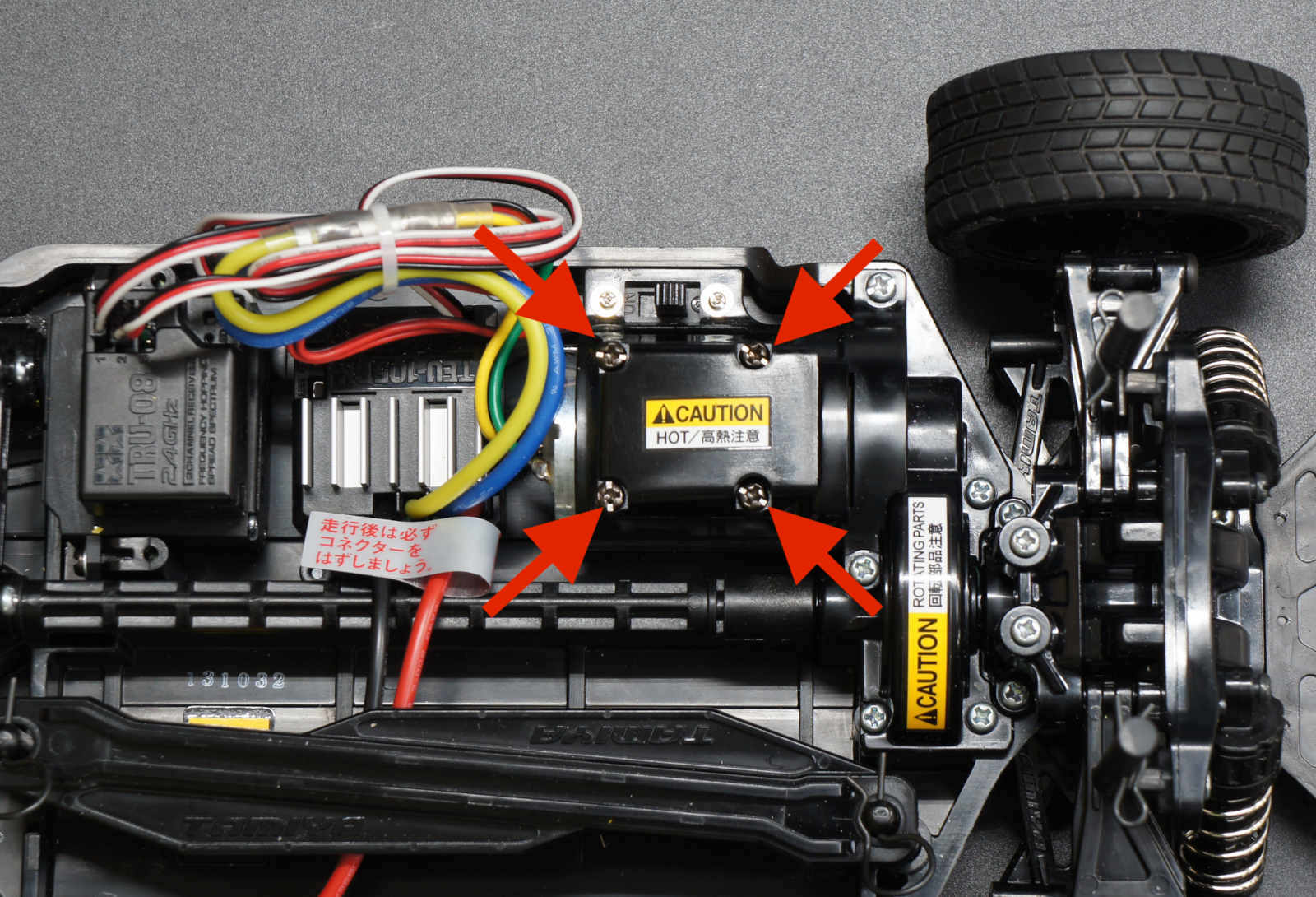
モーターのカバーを取り外します。
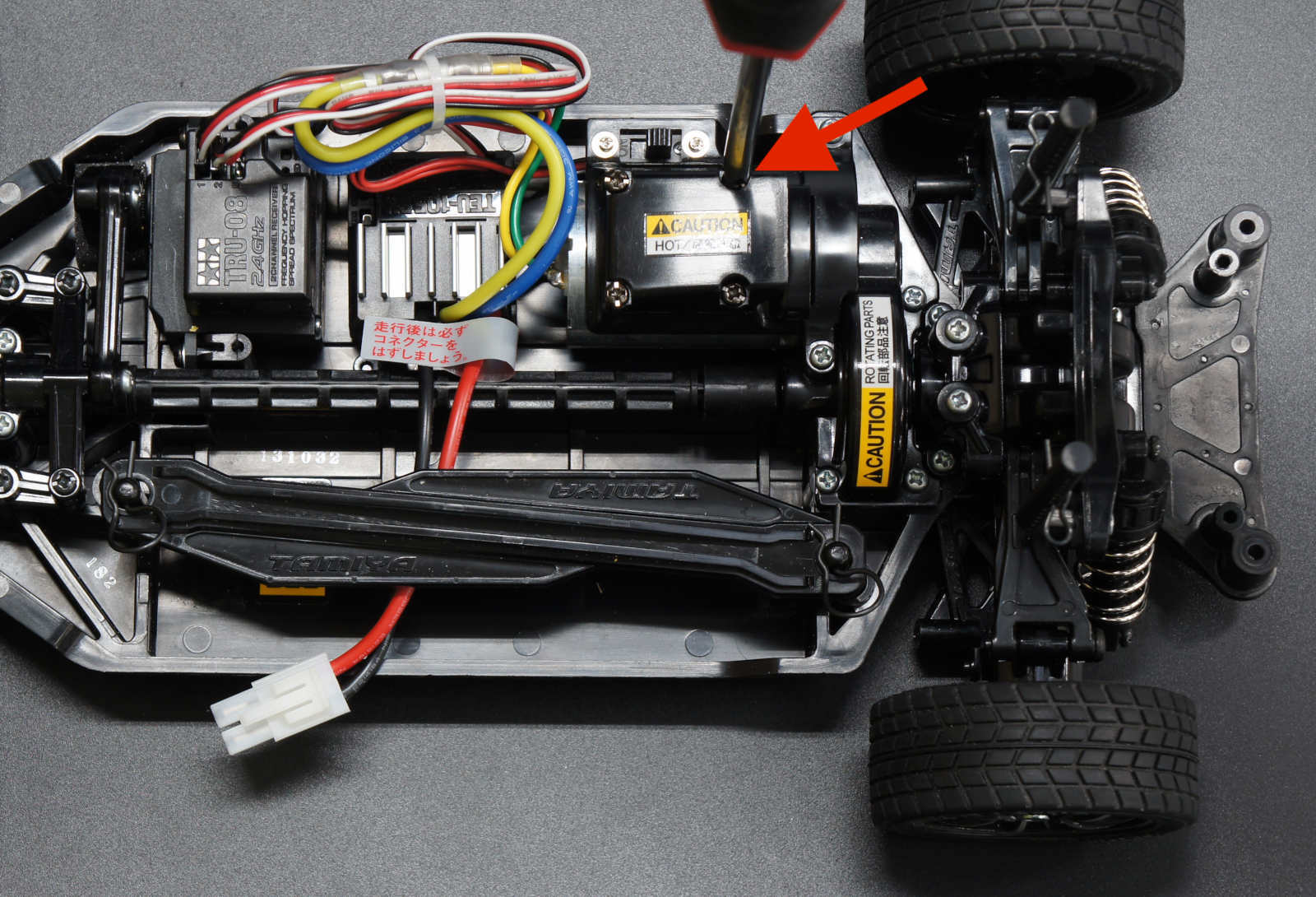
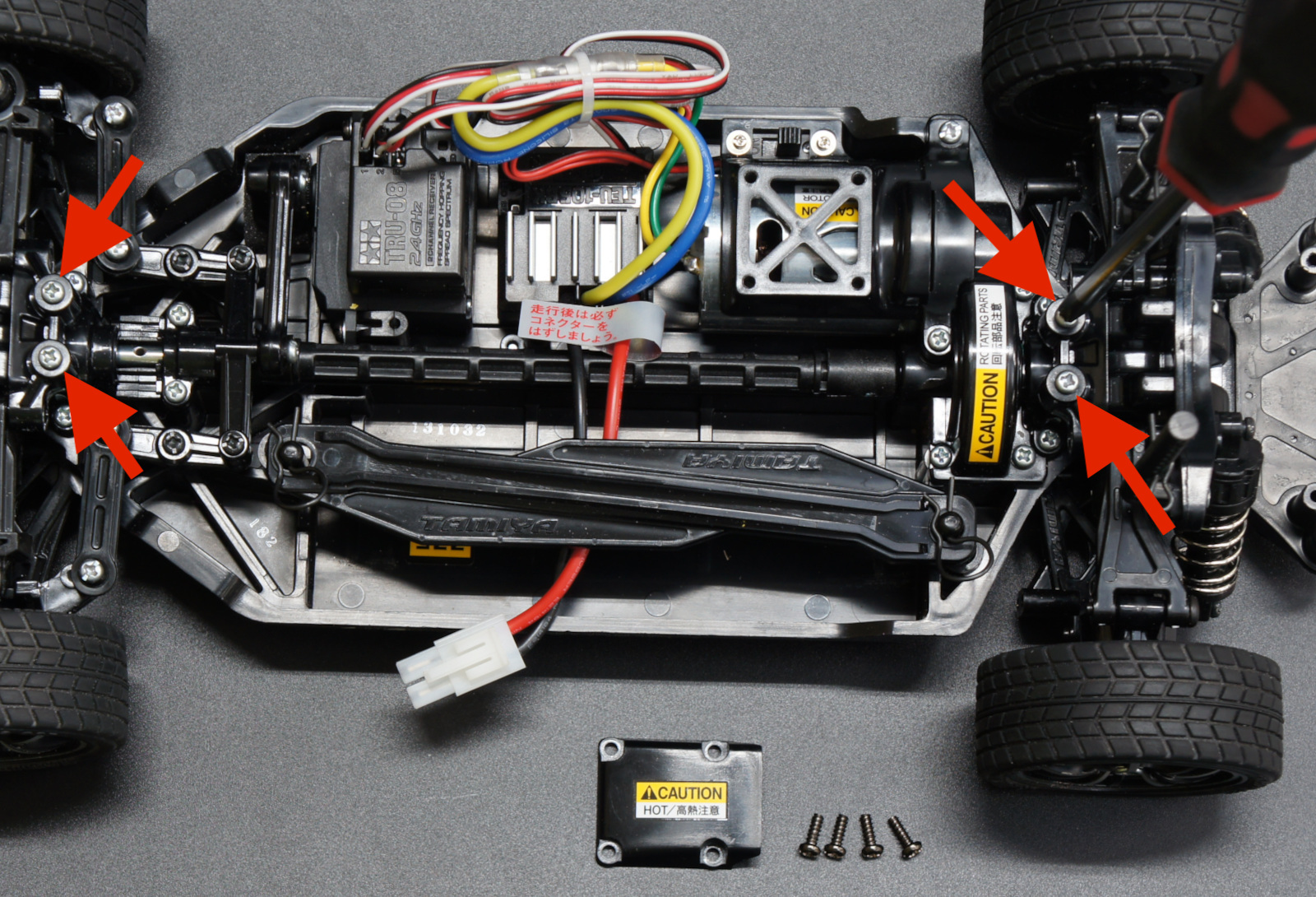
タッピングビスを計4本外します。
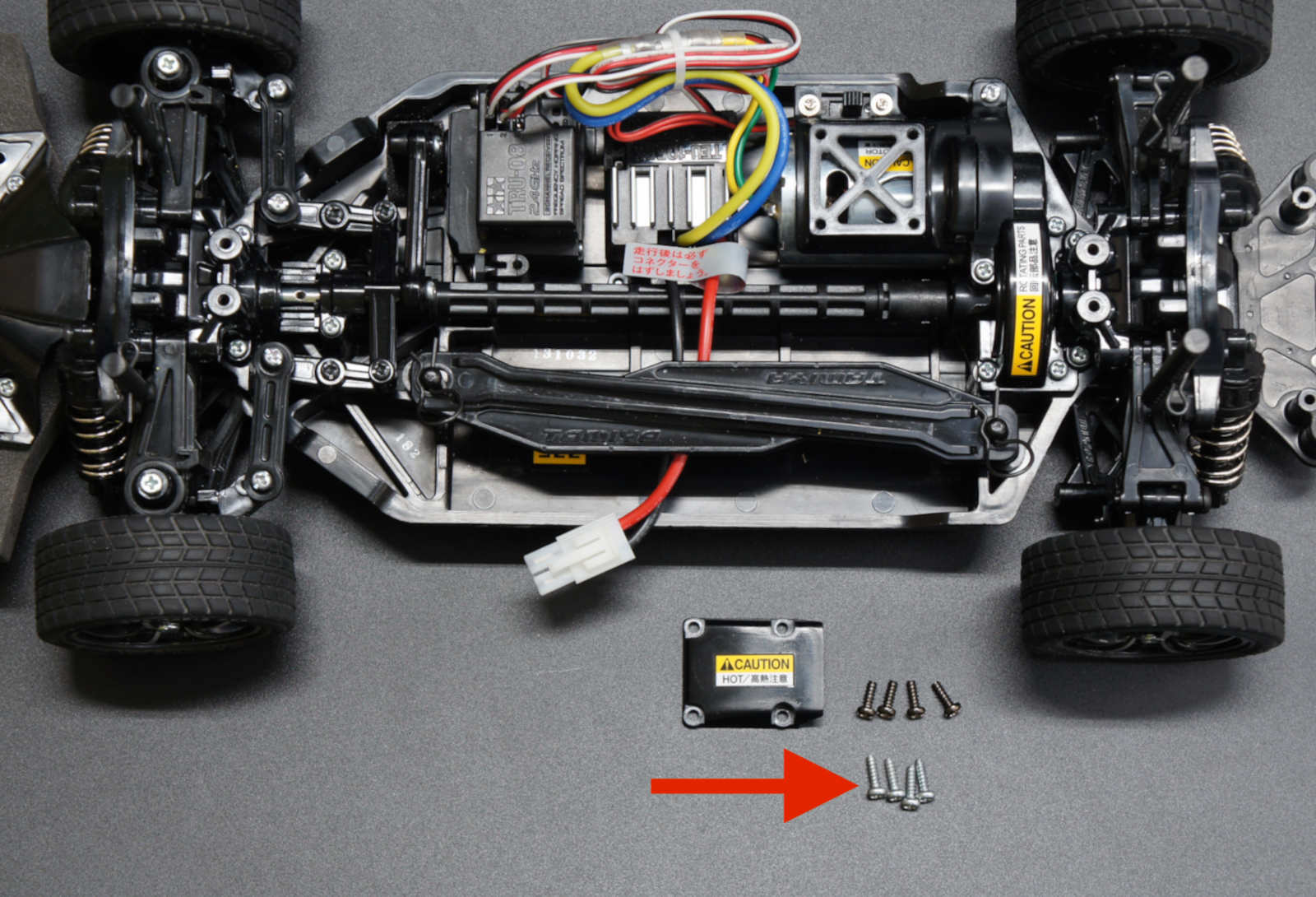
ねじを4本は後で使用します。
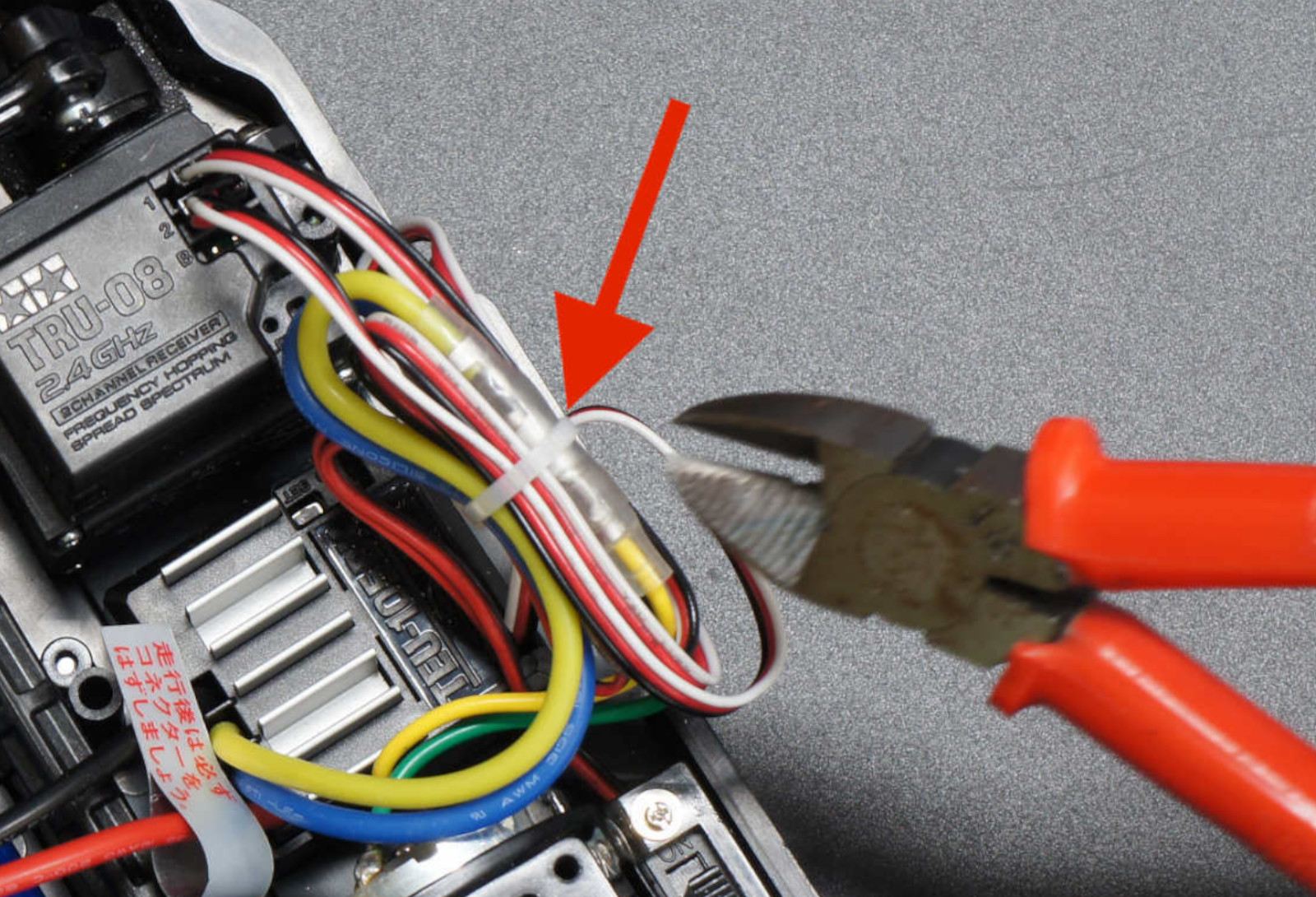
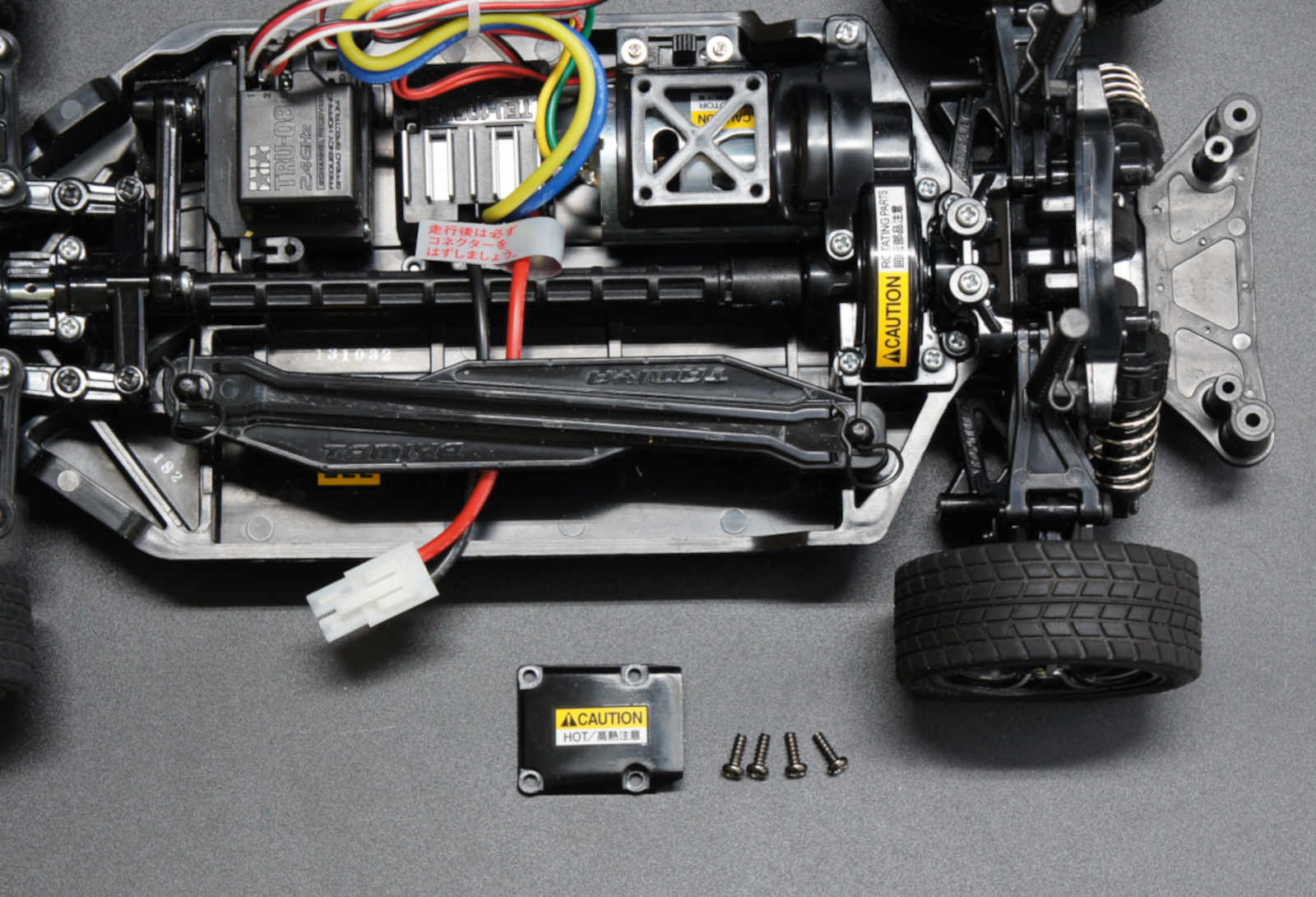
ケーブルを切らないように注意し、結束バンドを切ります。
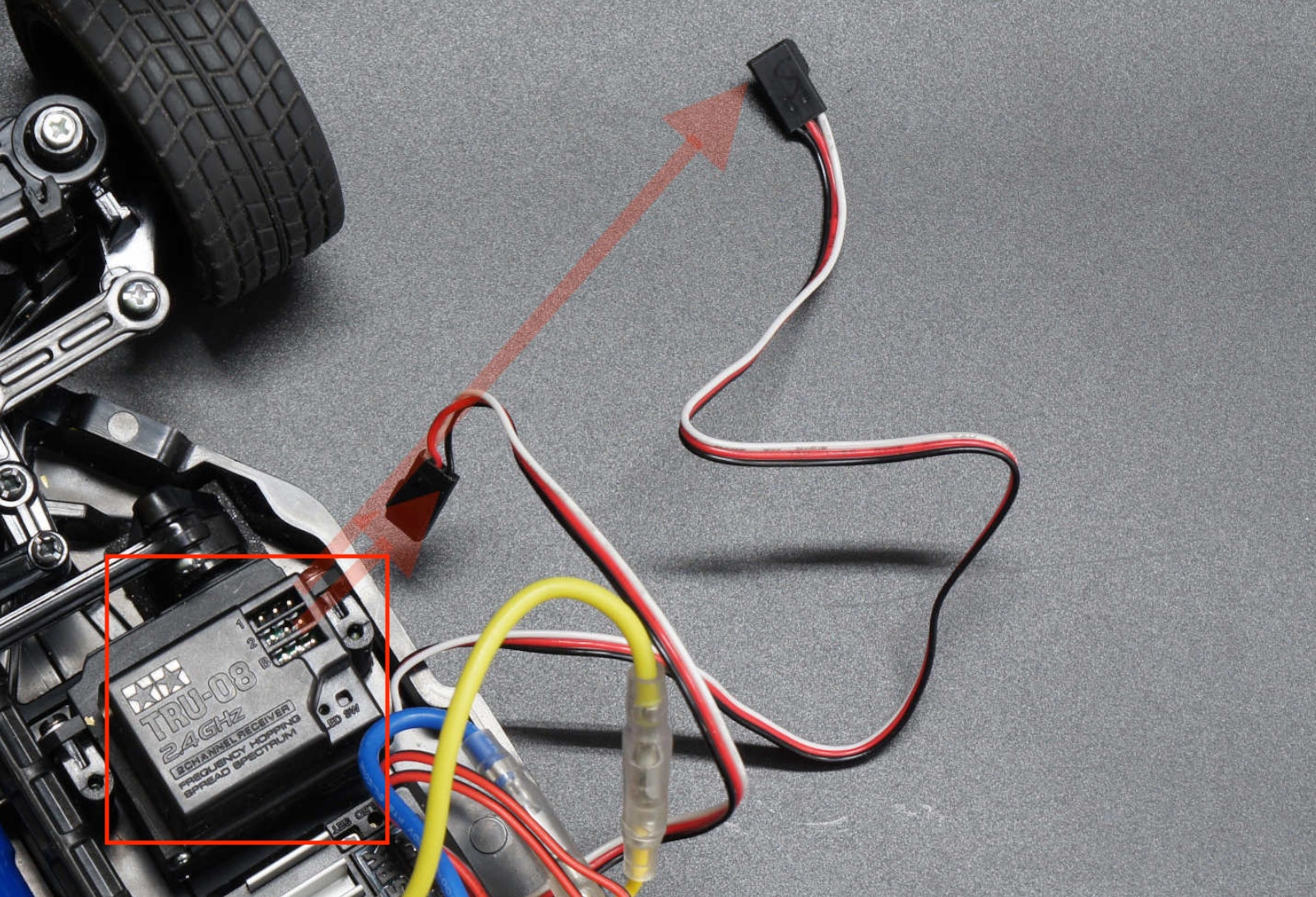
2つのコネクタを外します。受信機(TRU-08)も裏面のシール剥がして取り外します。バッテリーホルダーも取り除きます。
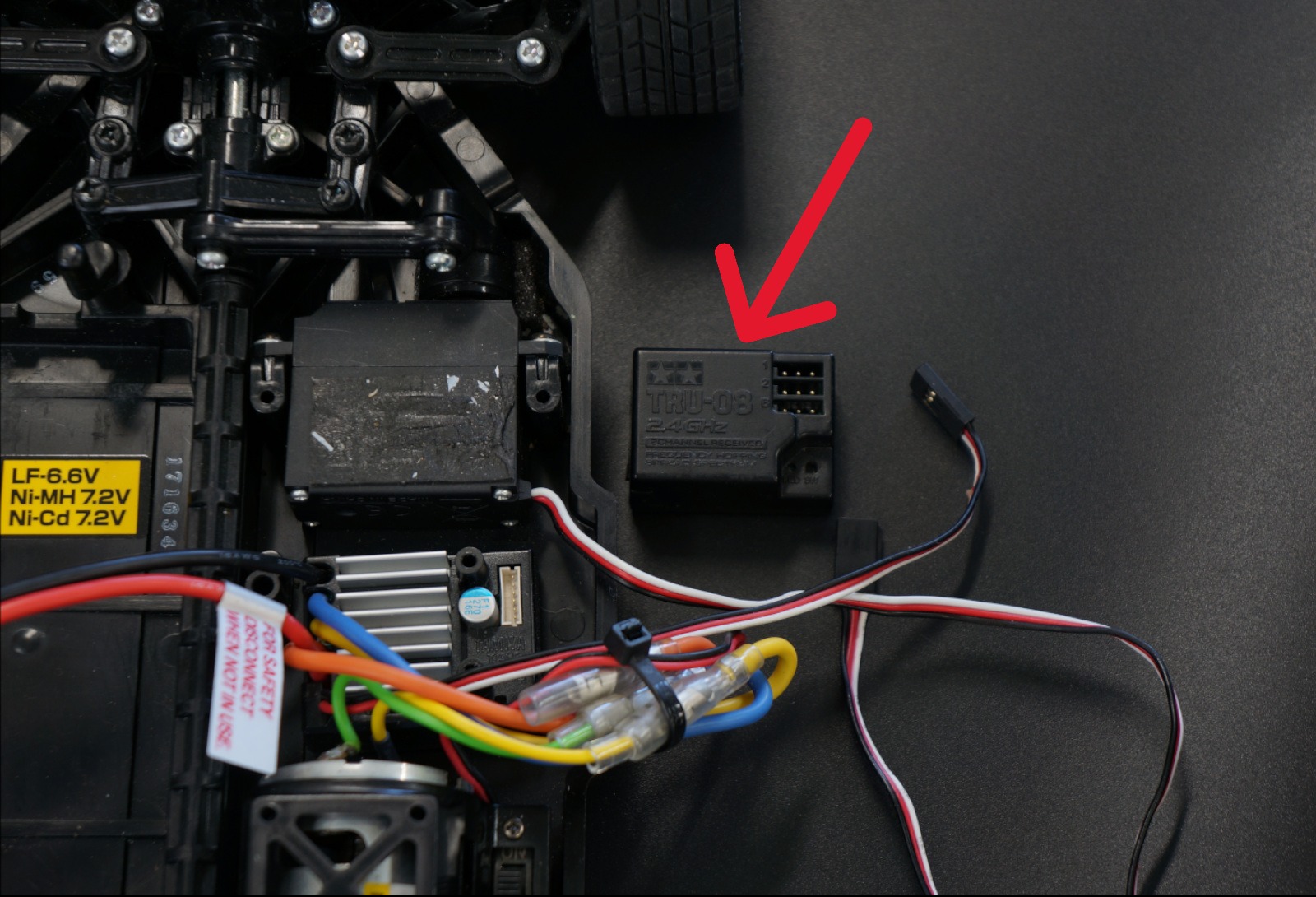
受信機も一旦剥がして車体から取り除きます。
FaBoレーシング RCカーのコンポーネントのご紹介
タミヤ TT-02 SRXまたはタミヤ TT-02のご使用の場合、サーボ、ESC取り付けまたは交換例(FaBo 2024年度のレース用車体)
| ステアリングサーボ | SANWA PGS-CL Ⅱ |
| スピードコントローラー | HOBBYWING QuicRUN-WP-1060-Brushed BEC内蔵3A/6V(HW 30120201) |
| ブラシモーター | OP.779 GTチューンモーター(25T) |
| SRXの場合、フロントデフを変更 | XV-02/TT-02 オイル封入式ギヤデフ (39T) ユニット |
※上のリスト部品は、本キットには付属しません。

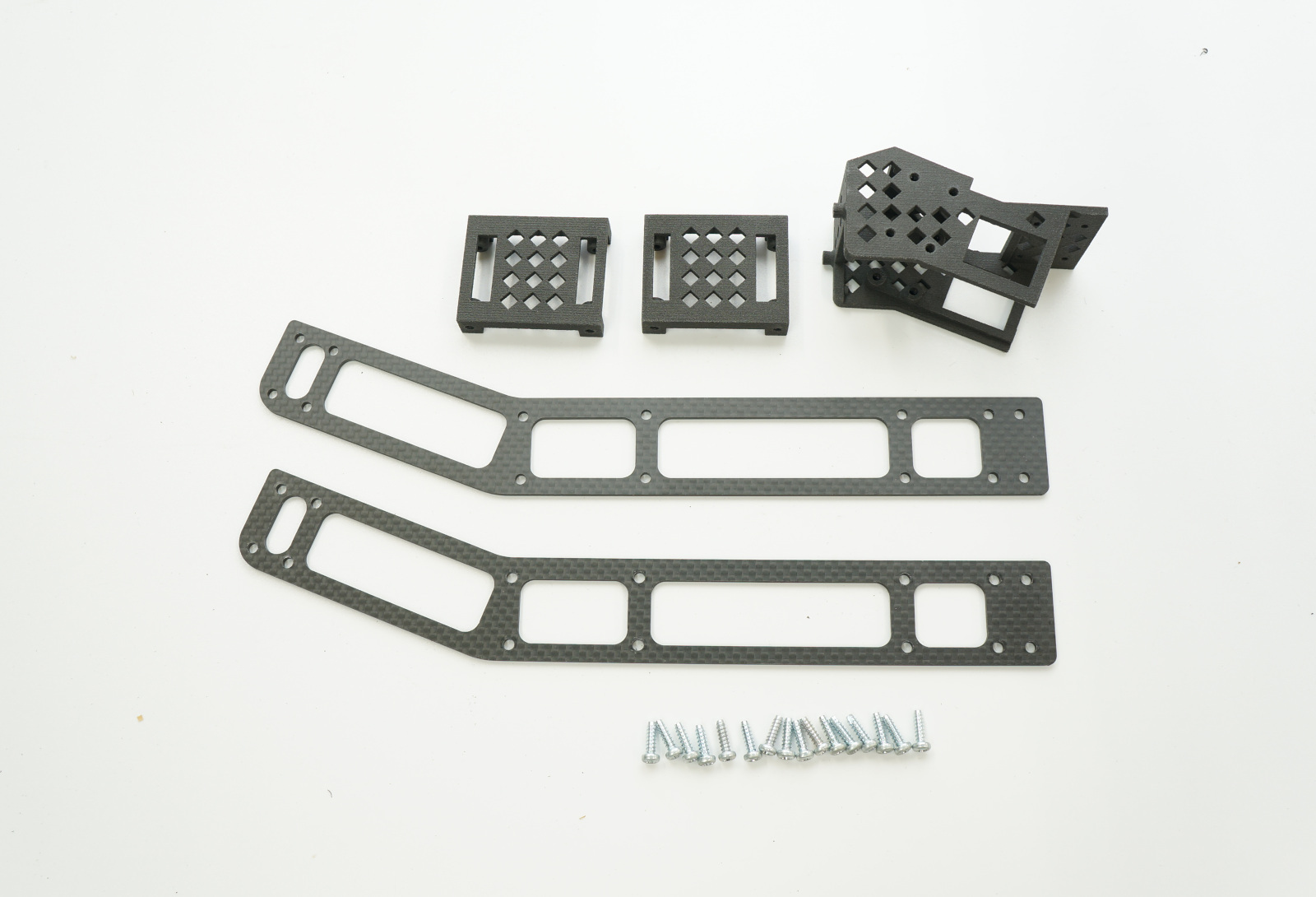
組立て
※組み立て車両はTamiya TT-02 SRXを一部使用しております。
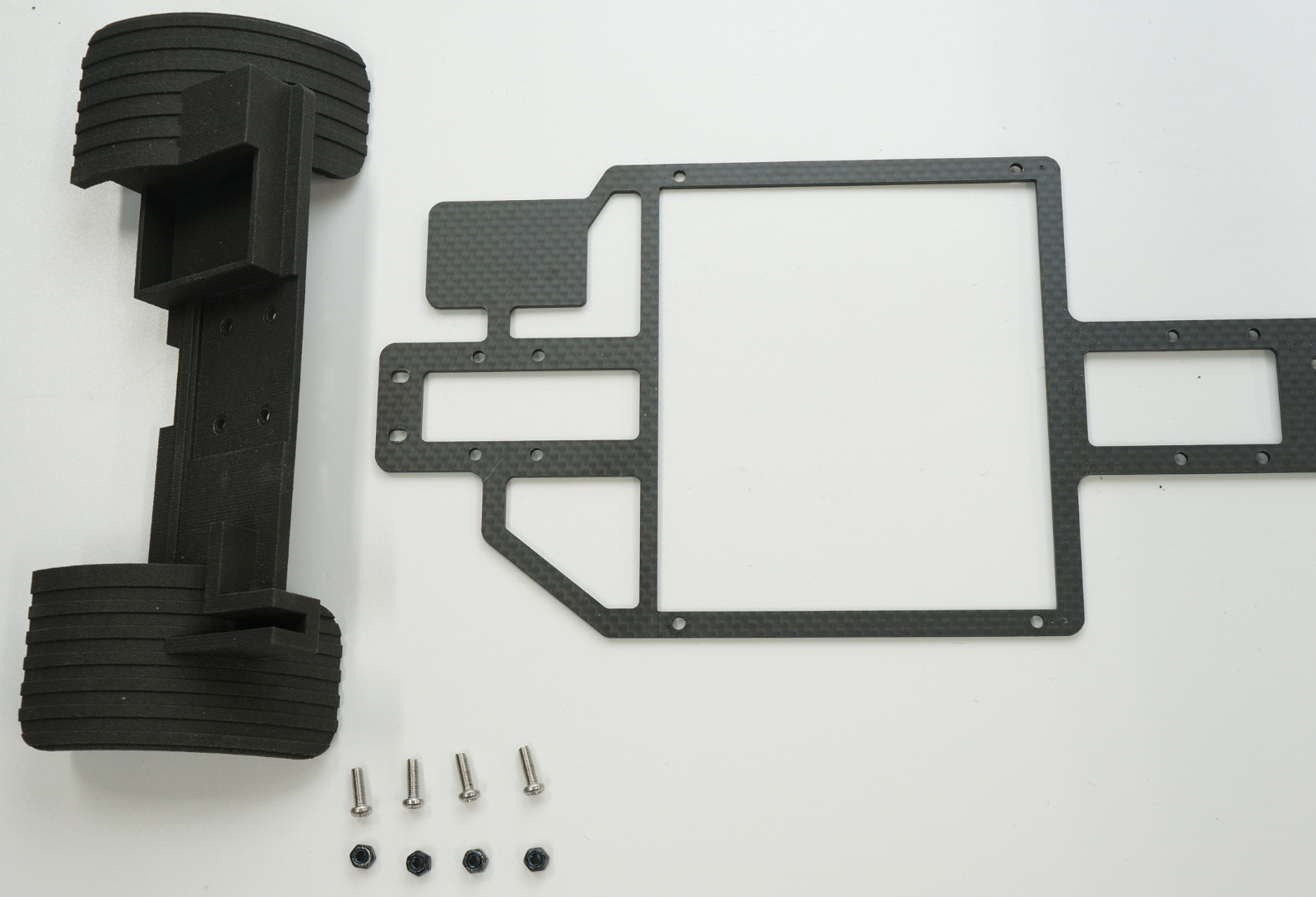
なべねじM3x10を4本、ロック付きナット(黒)M3でフロントマウントをカーボンベースに取り付けします。
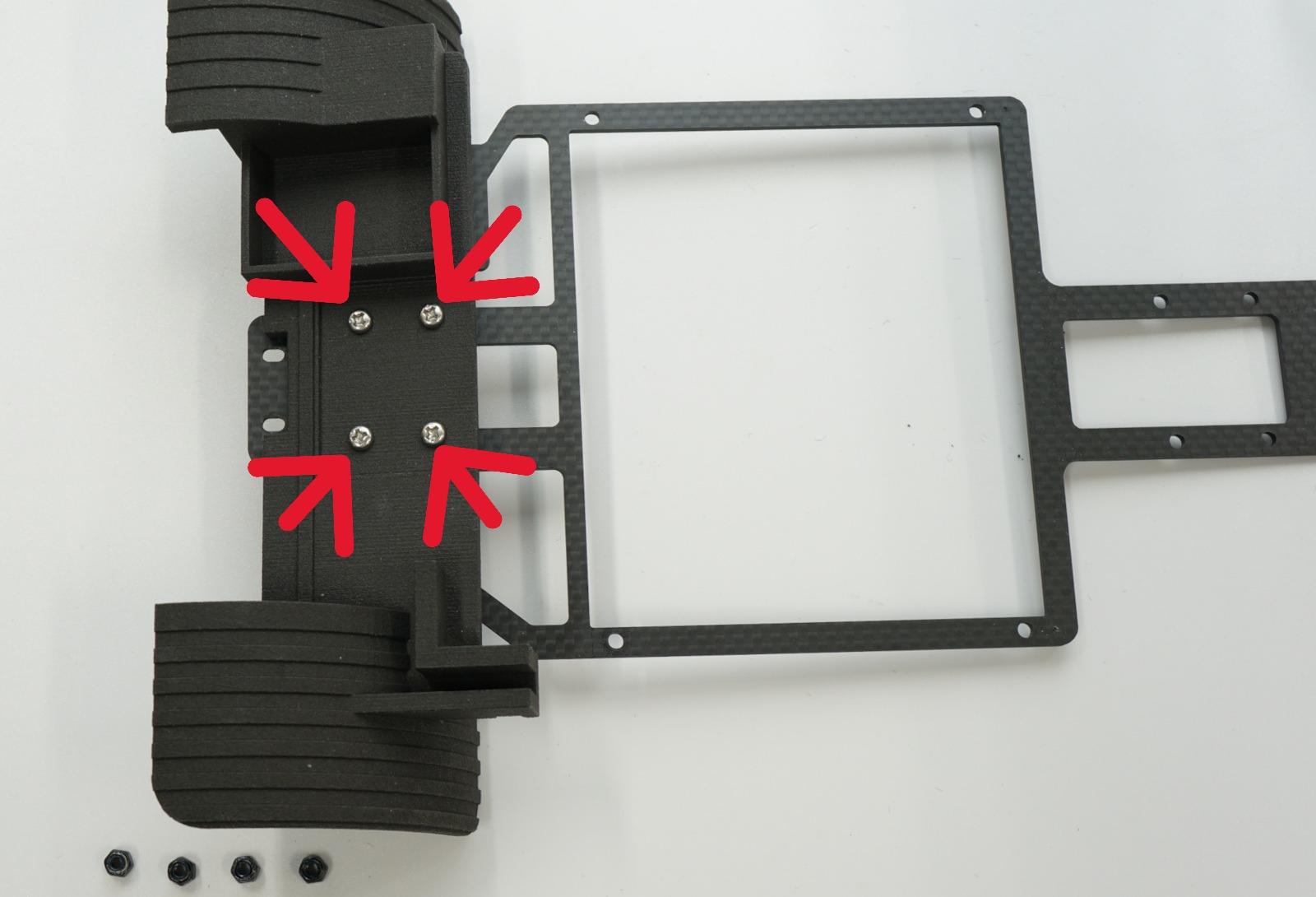
ナットドライバーと+ドライバーでねじを緩まないよう締めます。

皿ねじM3x10とロック付きナット(黒)M3それぞれ4個でJetsonベースを取り付けます。
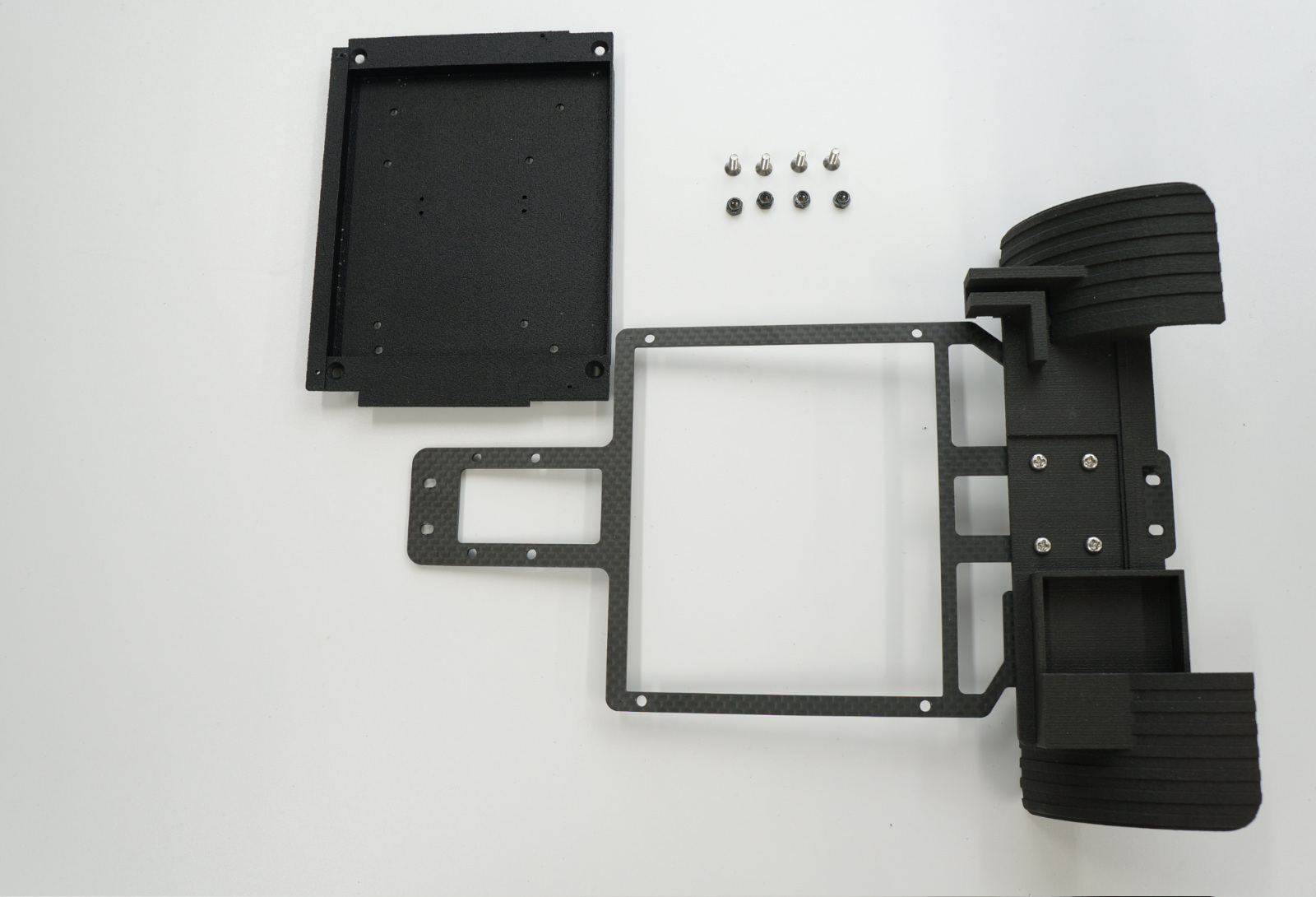
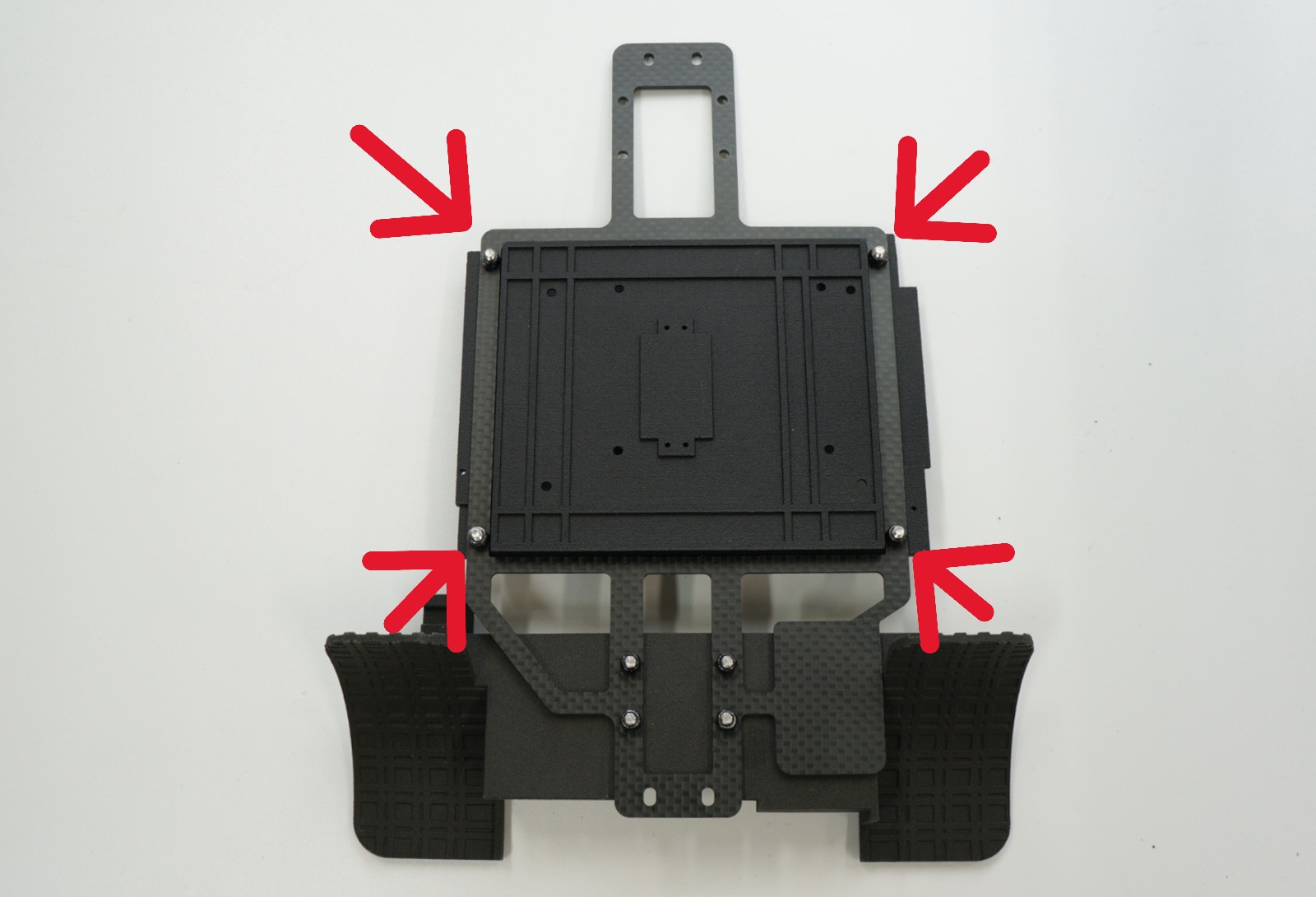
モンキーレンチまたスパナ5.5と+ドライバーを使用して締め付けます。

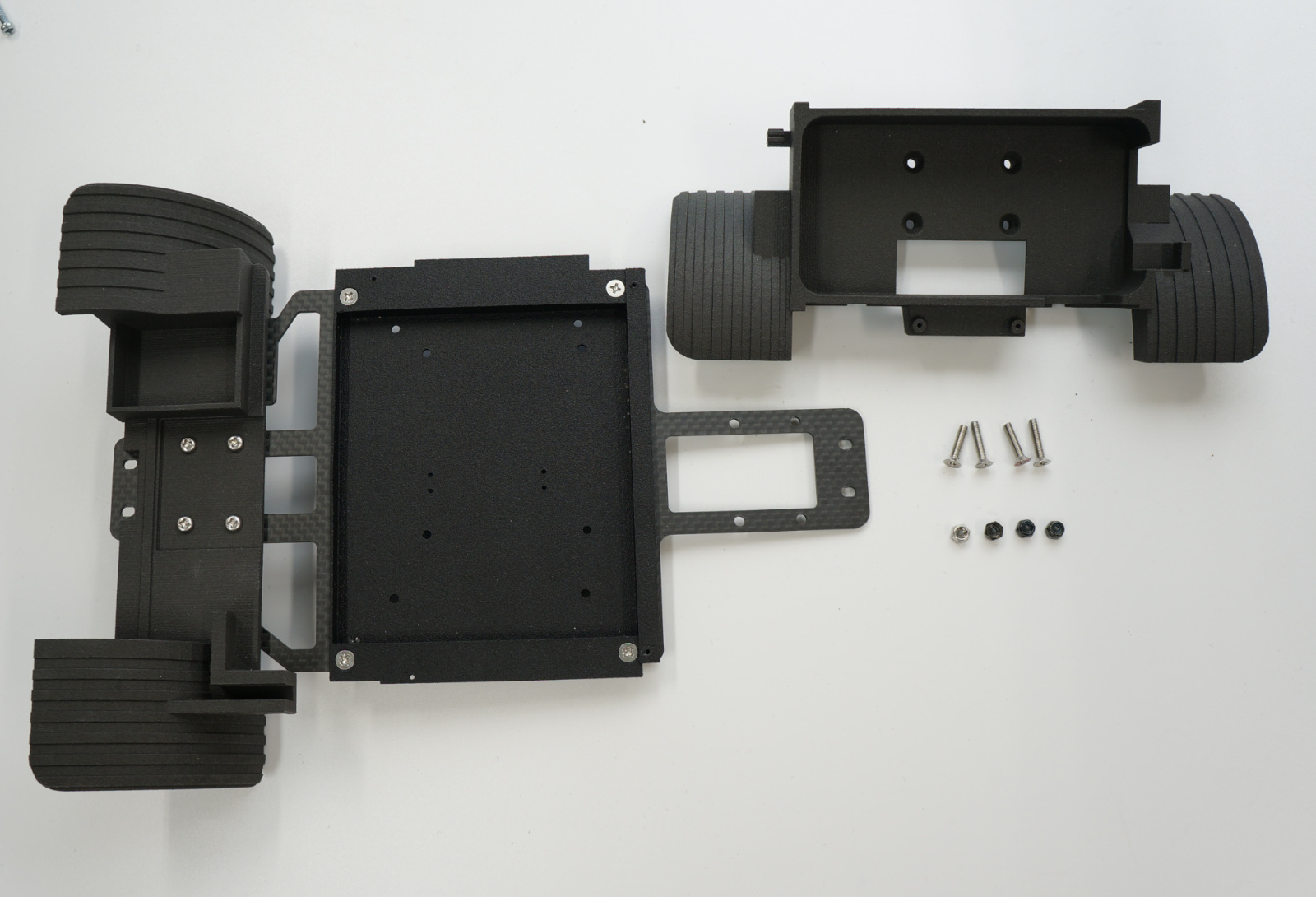
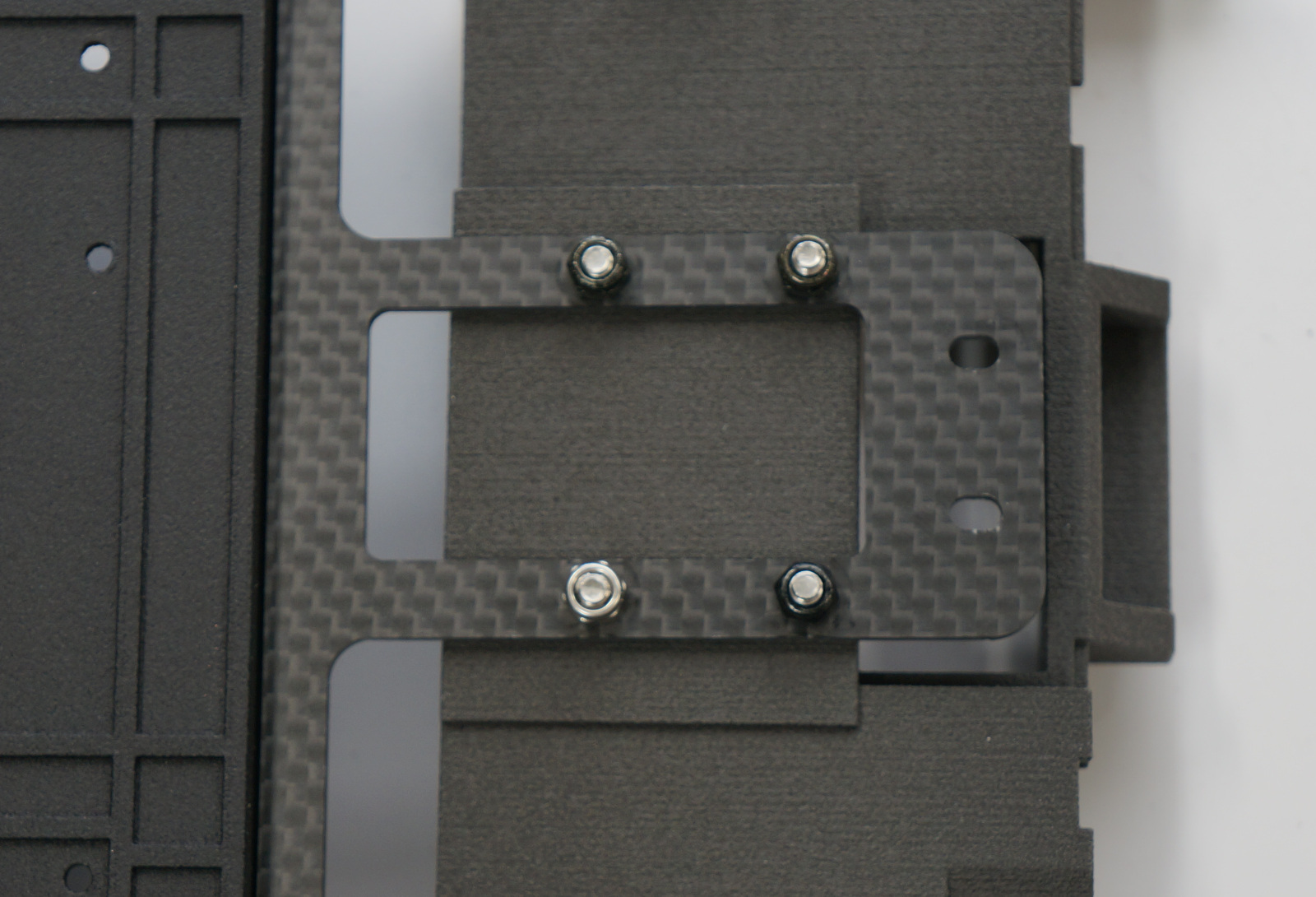
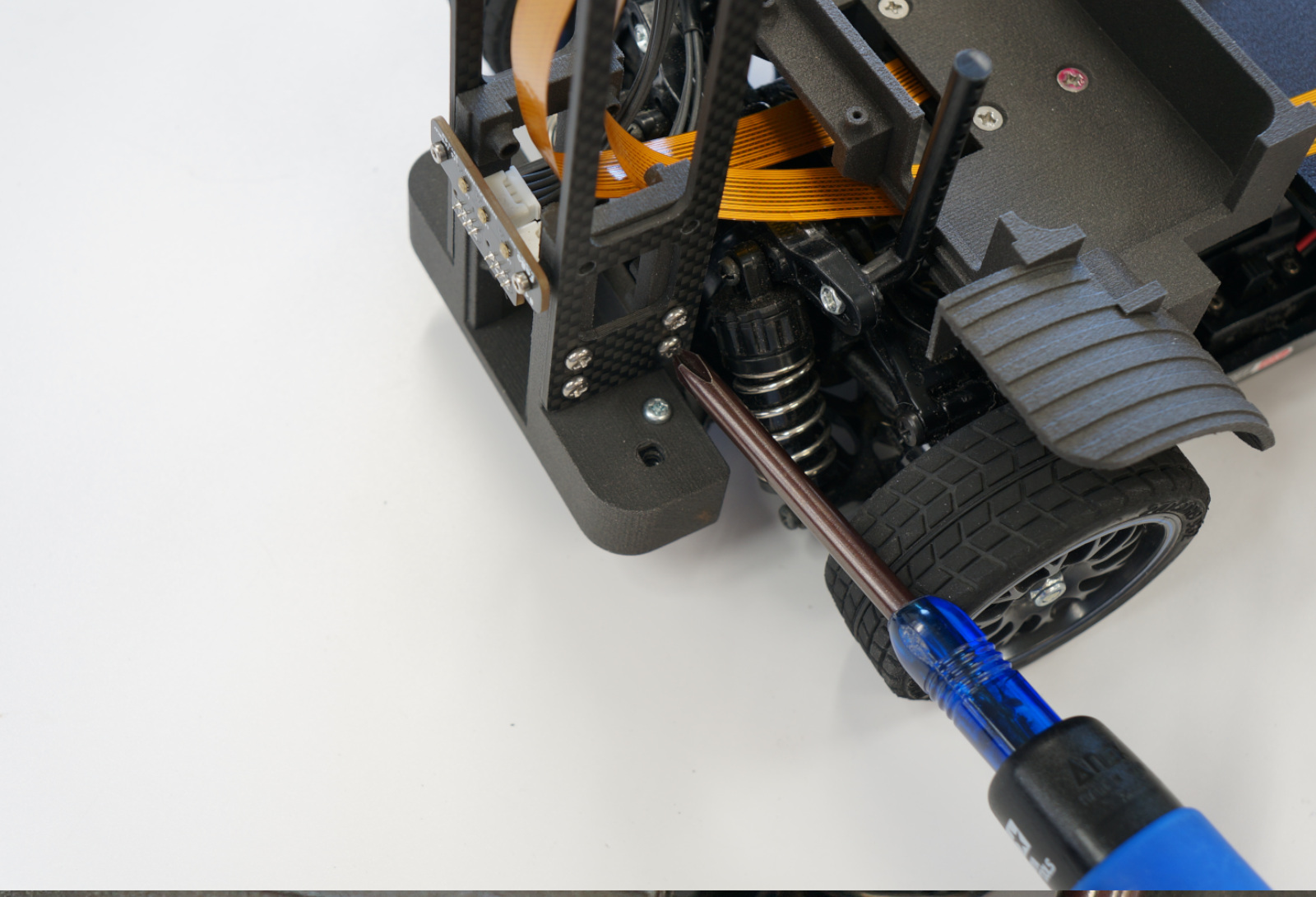
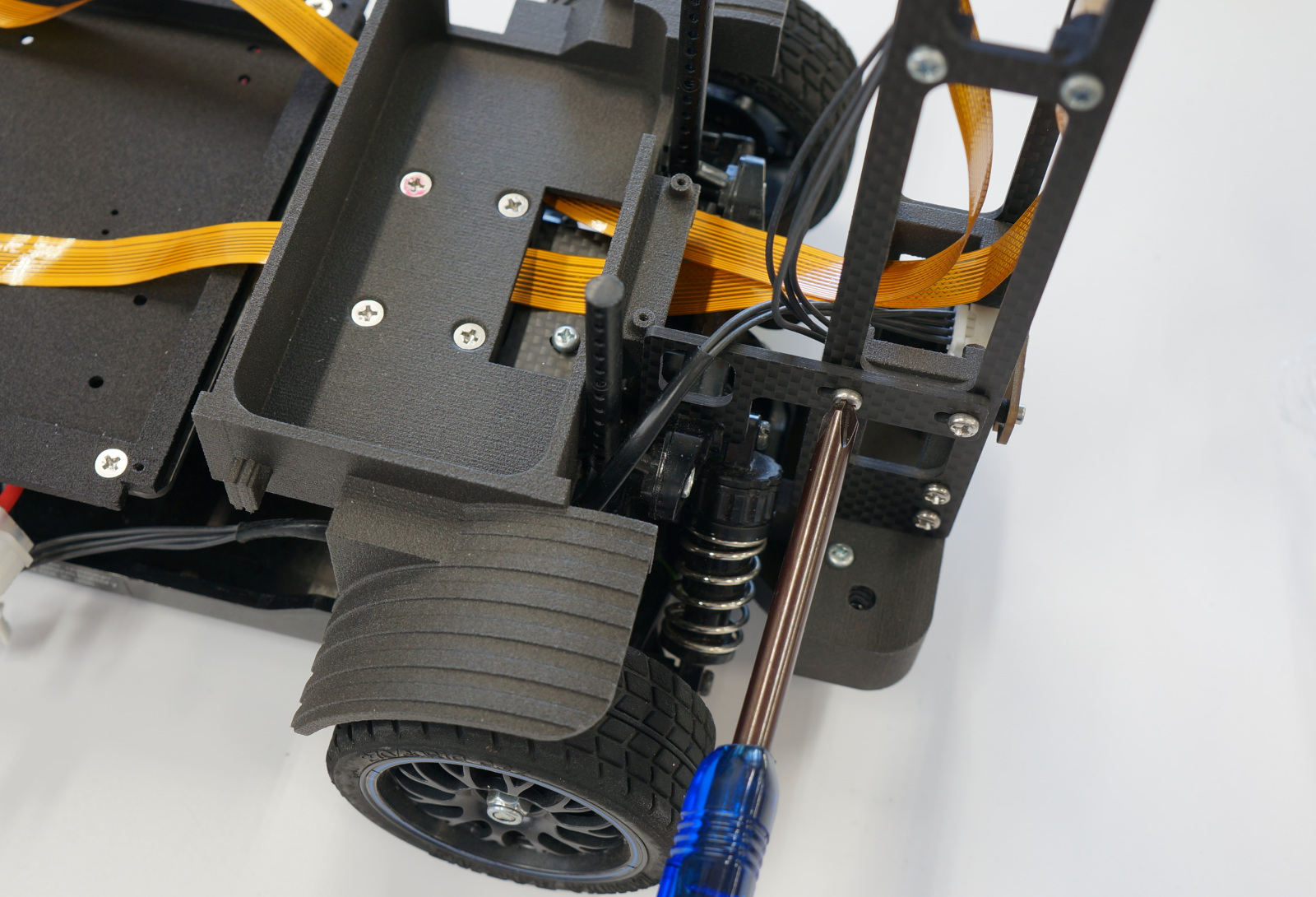
バックマウントを取り付けます。皿ねじM3x14 4本 1本、皿ねじM3x15 3本、ロック付きナット(黒)M3 3本、ロック付きナット(銀)1個を用意します。
部品変更のお知らせ
※2026年1月出荷以降は、皿ねじM3x14 4本、ロック付きナット(黒)M3 3本、ロック付きナット(銀)1個となります。
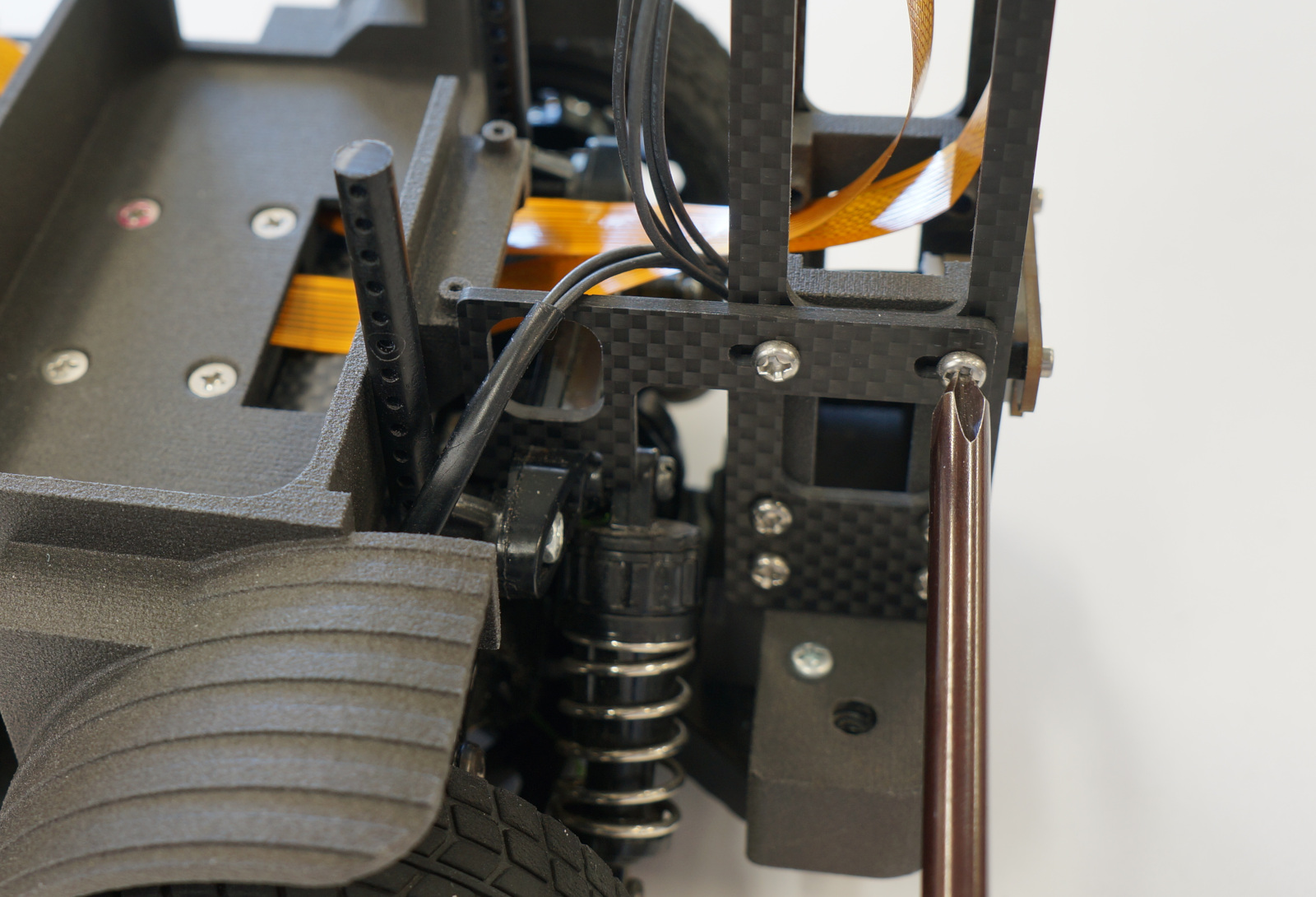
青いマーカーは皿ねじM3x14とロック付きナット(銀)、赤いマーカーは皿ねじM3x15、ロック付きナット(黒)を使います。
部品変更のお知らせ
※2026年1月出荷以降は、皿ねじM3x14に統一となります。
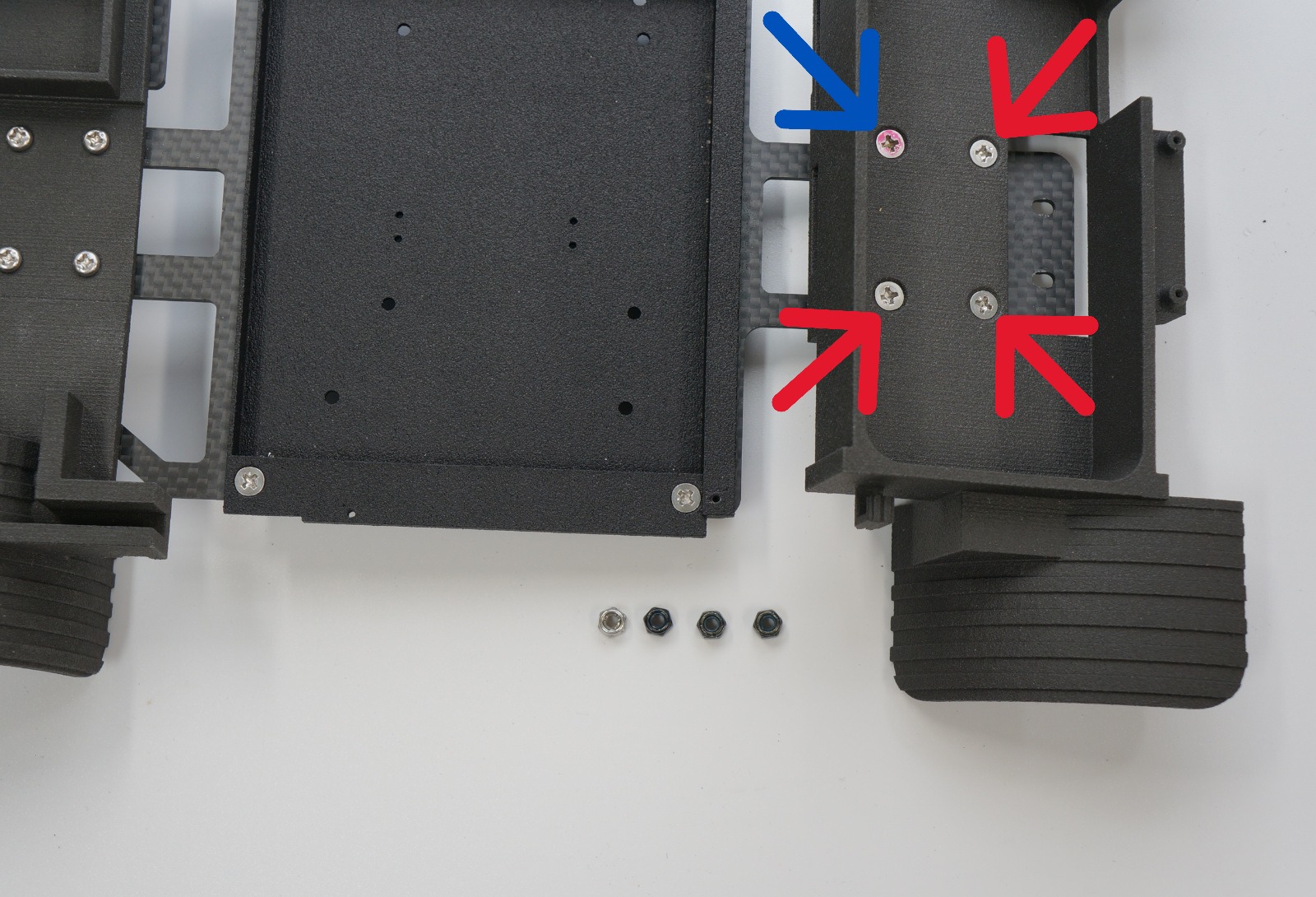
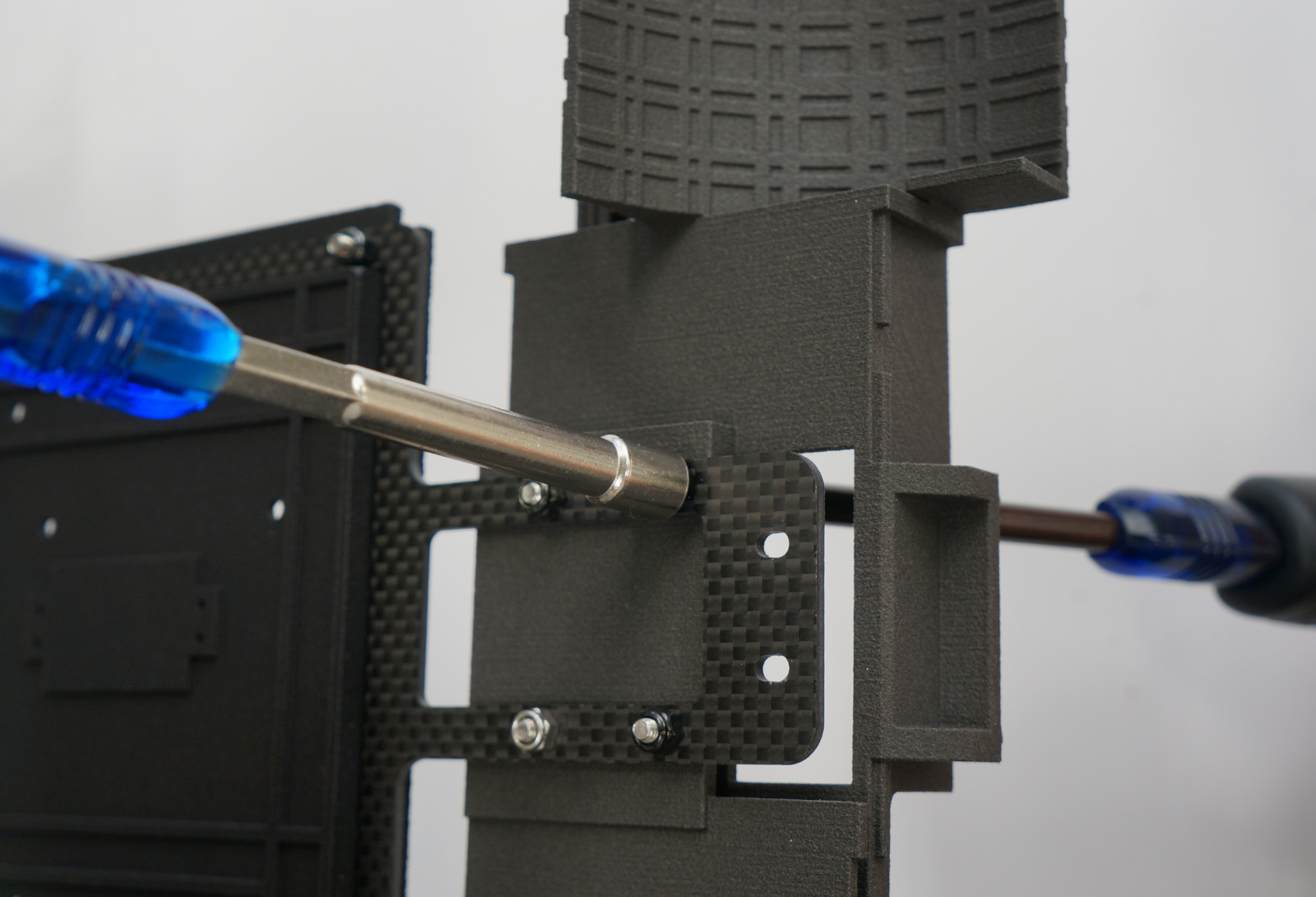
ナットドライバ5.5mmと+ドライバーで締めます。
カメラベースをリアパンパーに装着し、タッピングビス M3 X 10でねじを締めます。
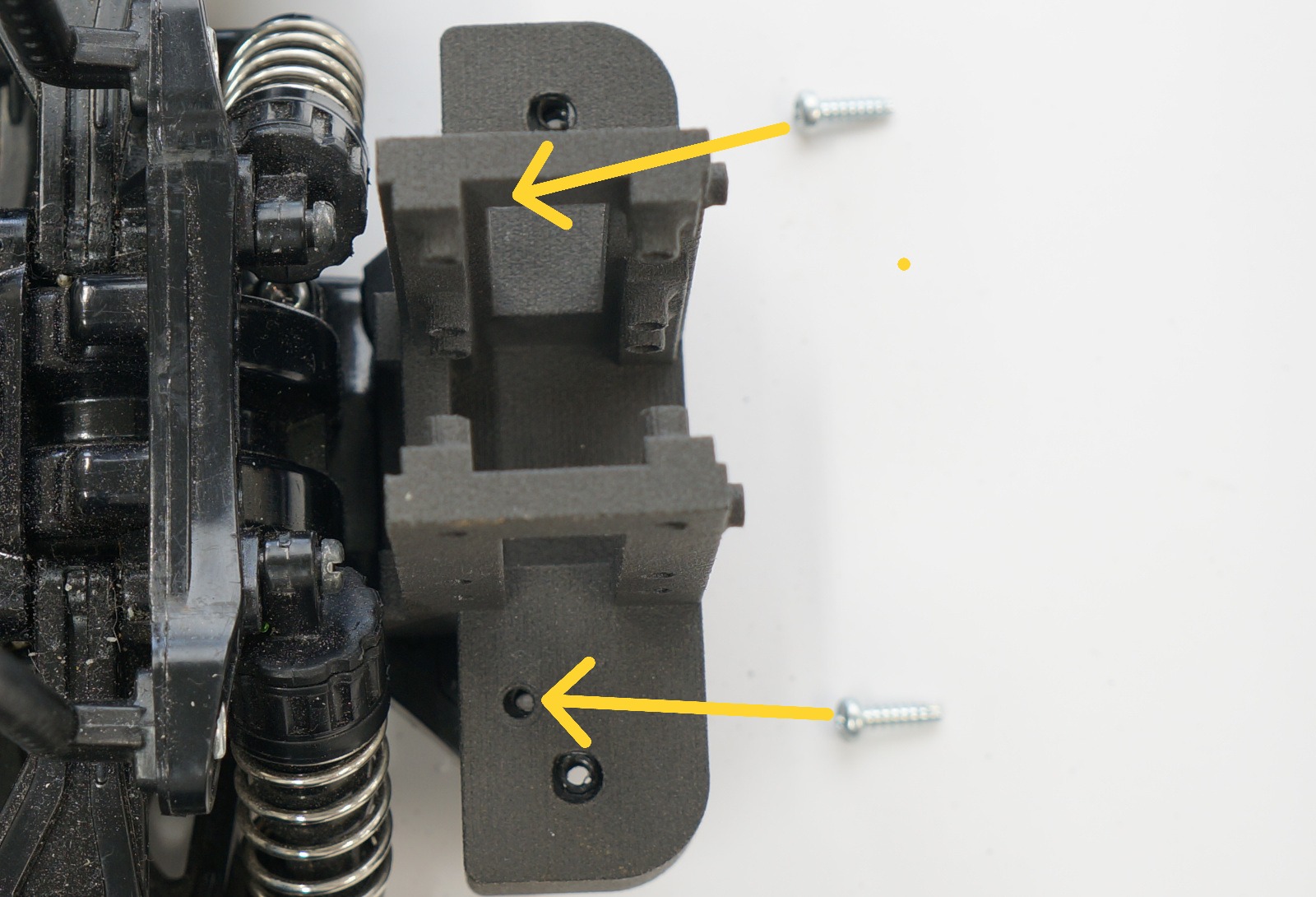
+ドライバで締め付けます。
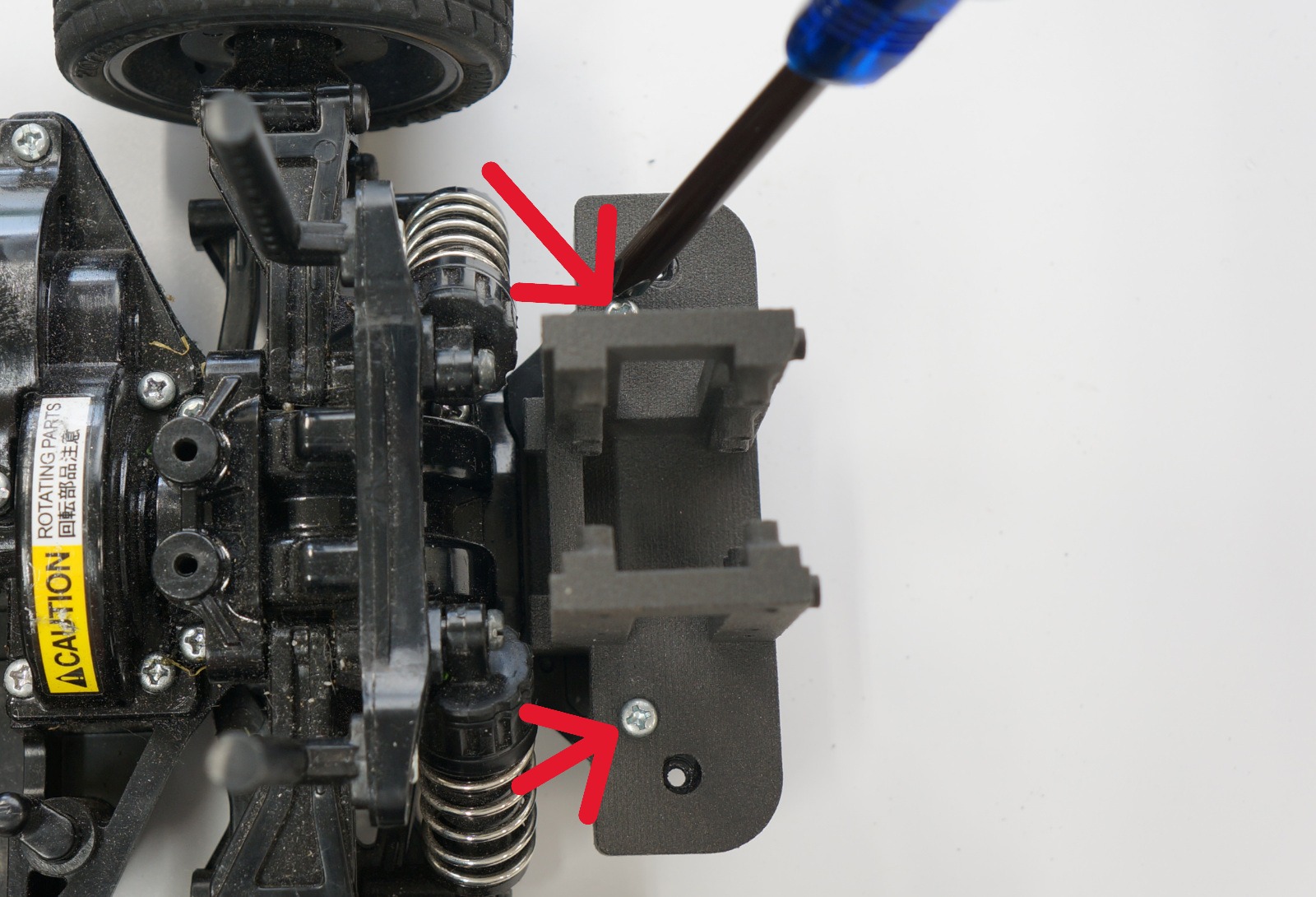
TT-02エキスパートビルドの装着されていたタッピングねじを使いRCカーに取り付けます。を使い車体とプレートを結合させます。
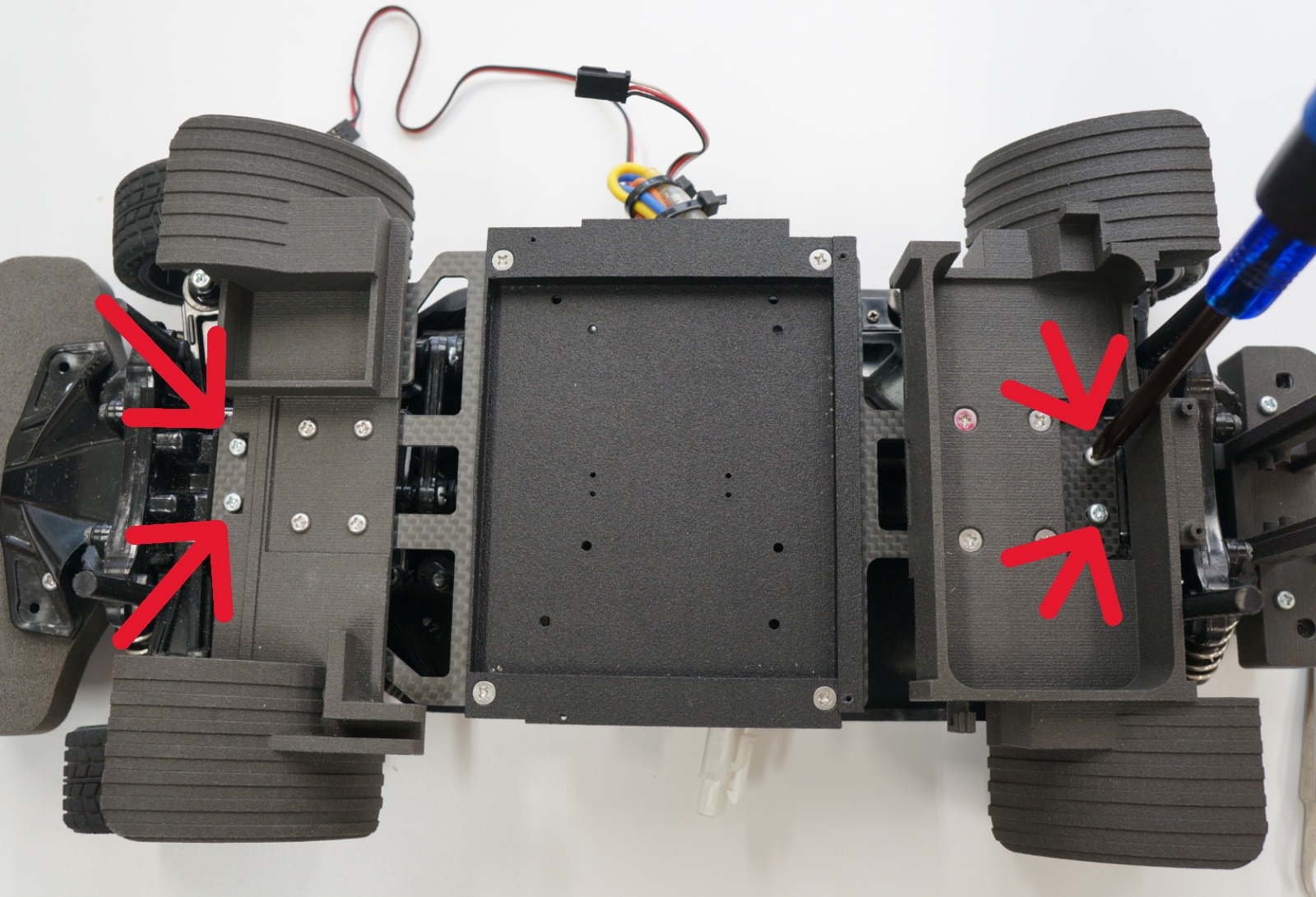
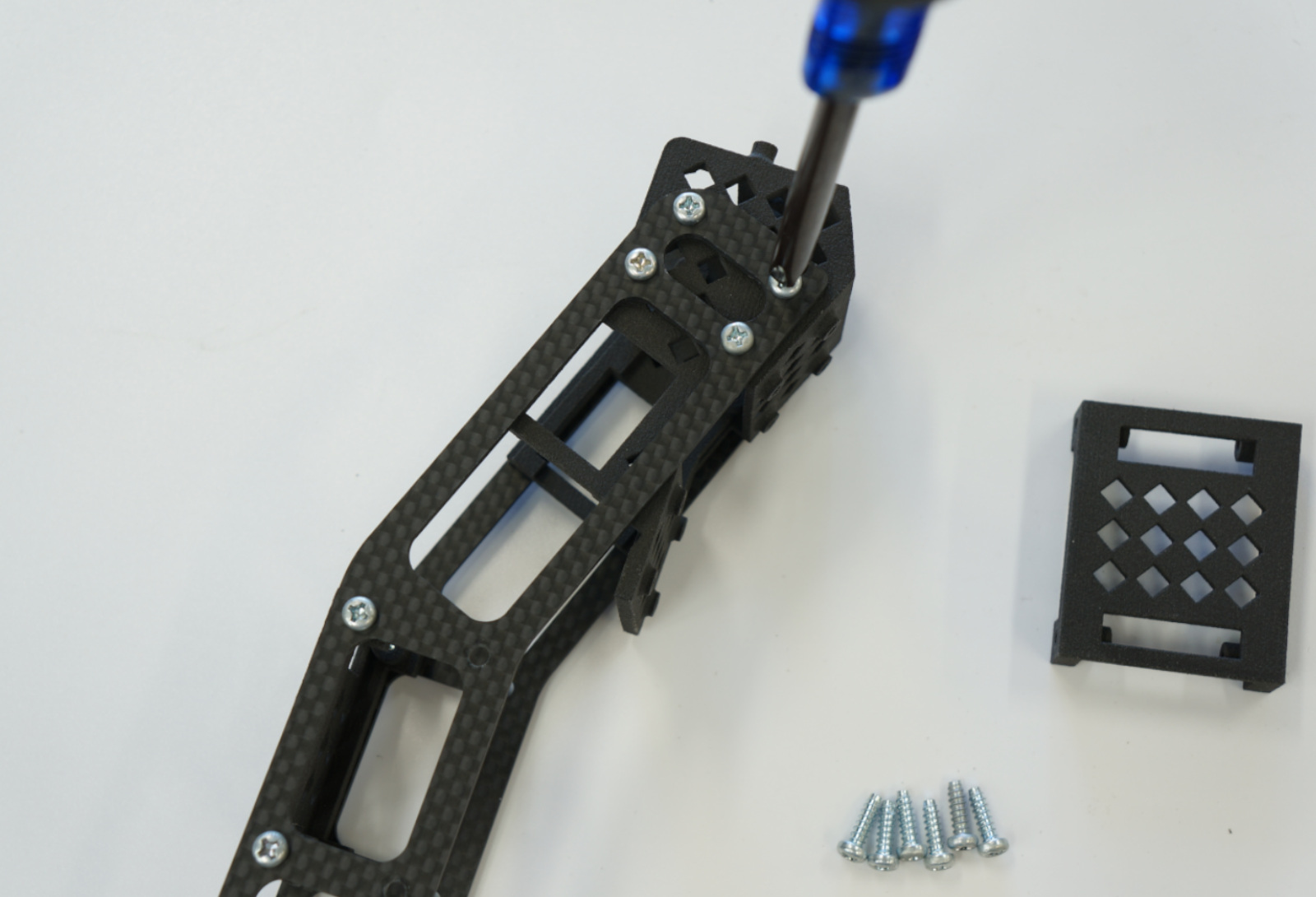
カメラマウントを組立て、取り付けます、タッピングビス M3 X 10 16本を使用します。
カメラマウントを装着します。タッピングビス M3 X 10で両側にカメラマウントとケーブルホルダー2個のうち1個を取り付けます。

タッピングビス M3 X 10を写真の箇所に取り付けします。片面6か所、合計12か所(ねじ締めすぎに注意)
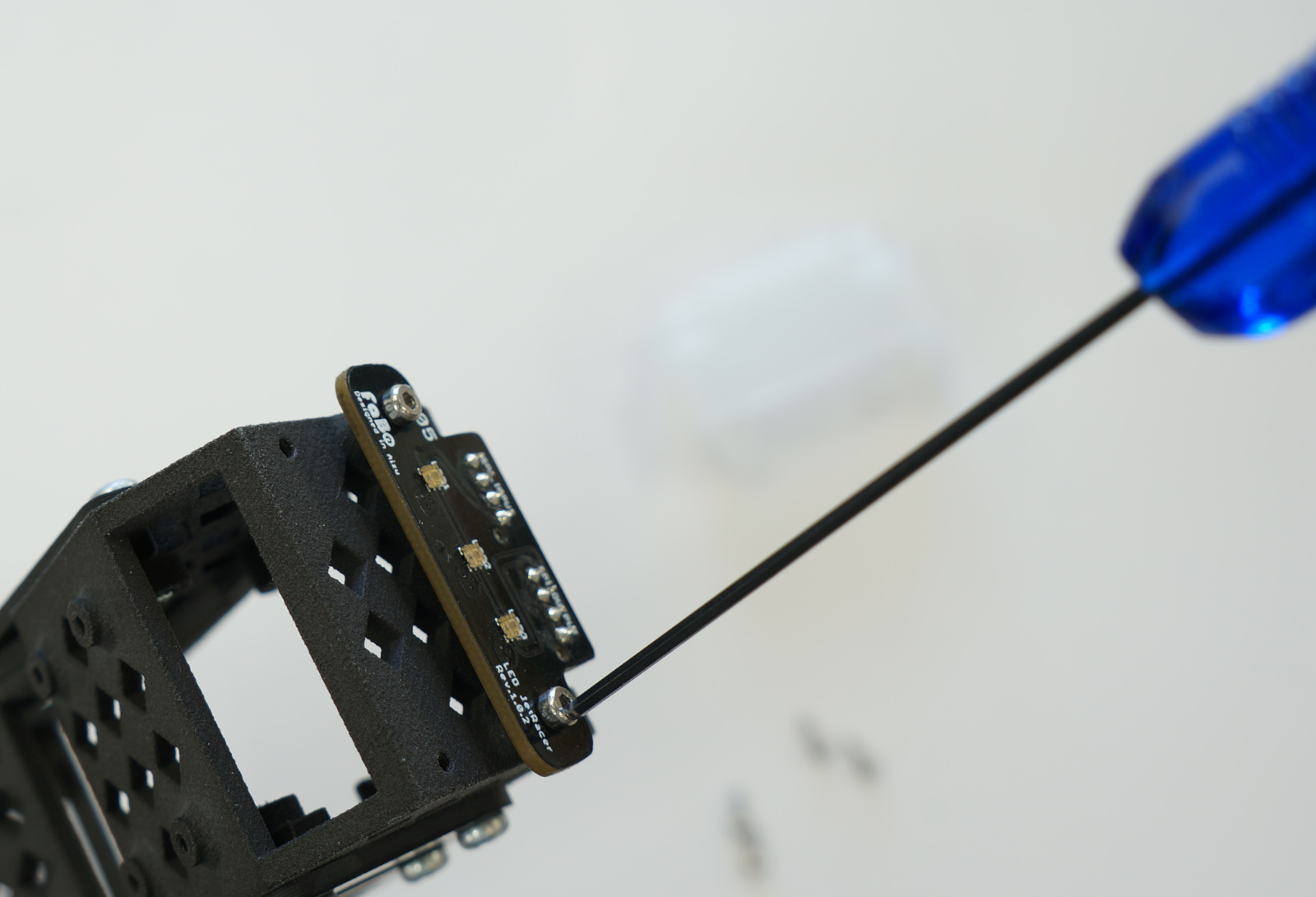
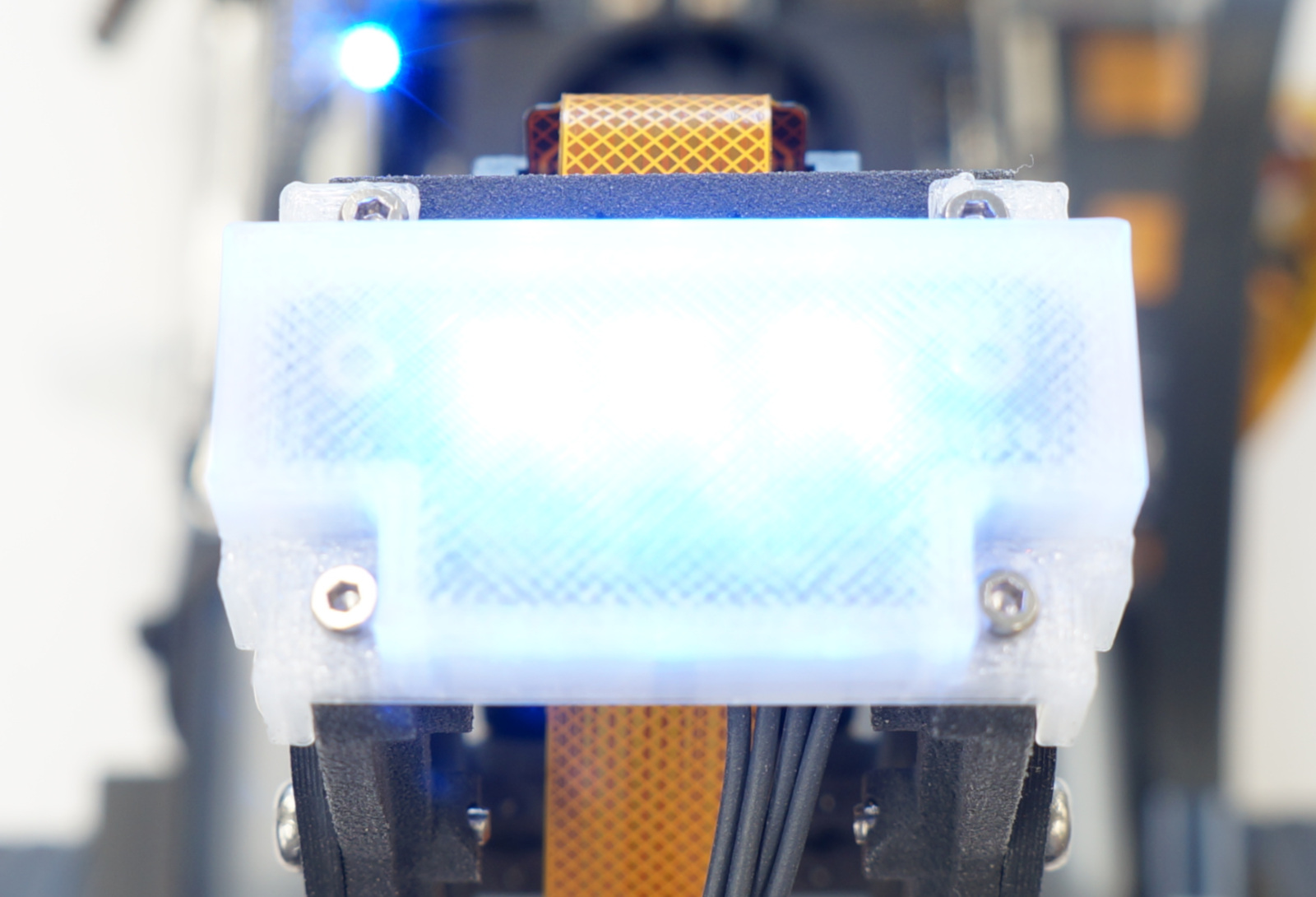
LEDボードをカメラマウント上部に取り付けします。

タッピングビスM2 x 6 2本で取り付けします。
タッピングビスM2 x 6 4本でLEDカバーを取り付けします。
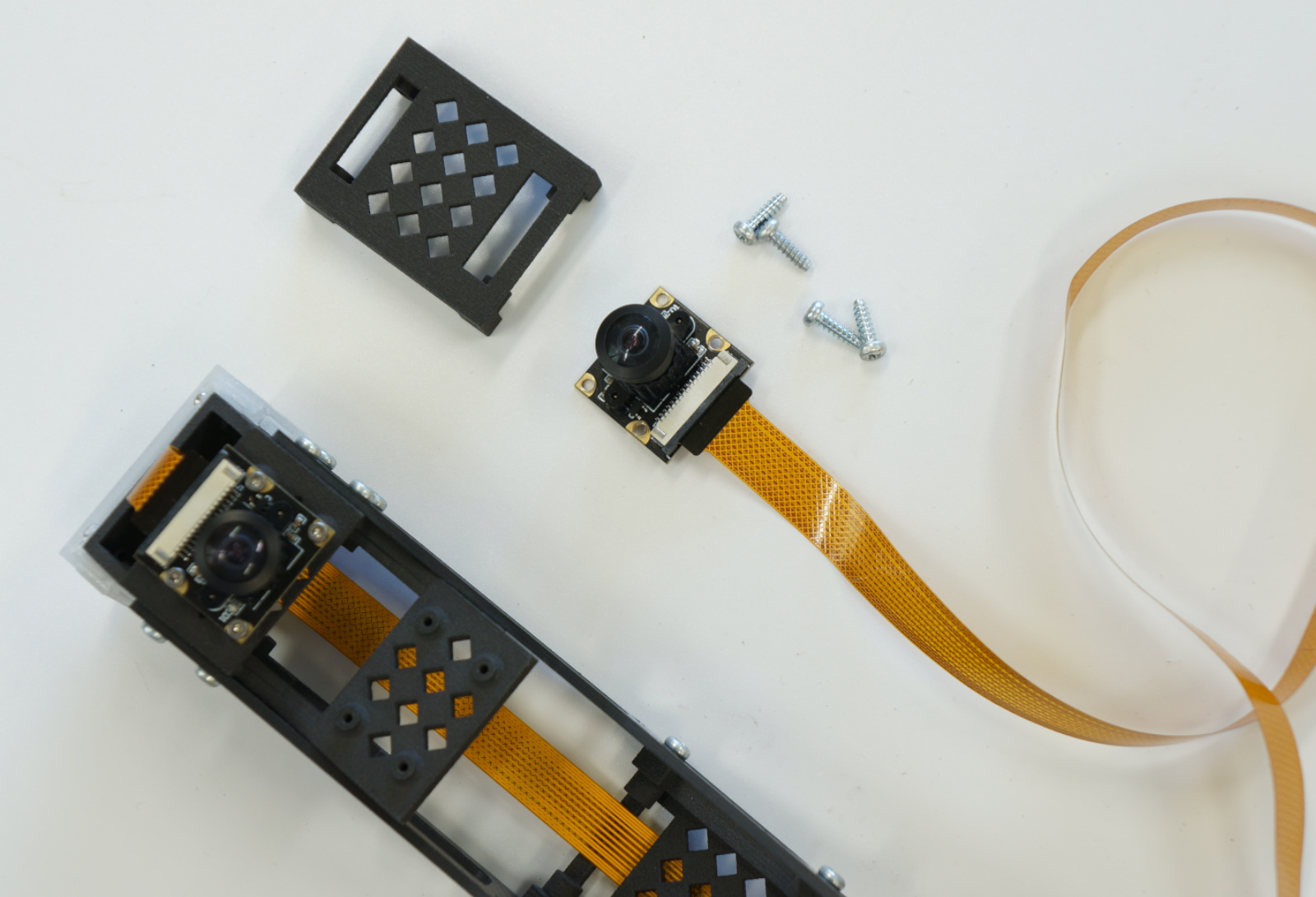
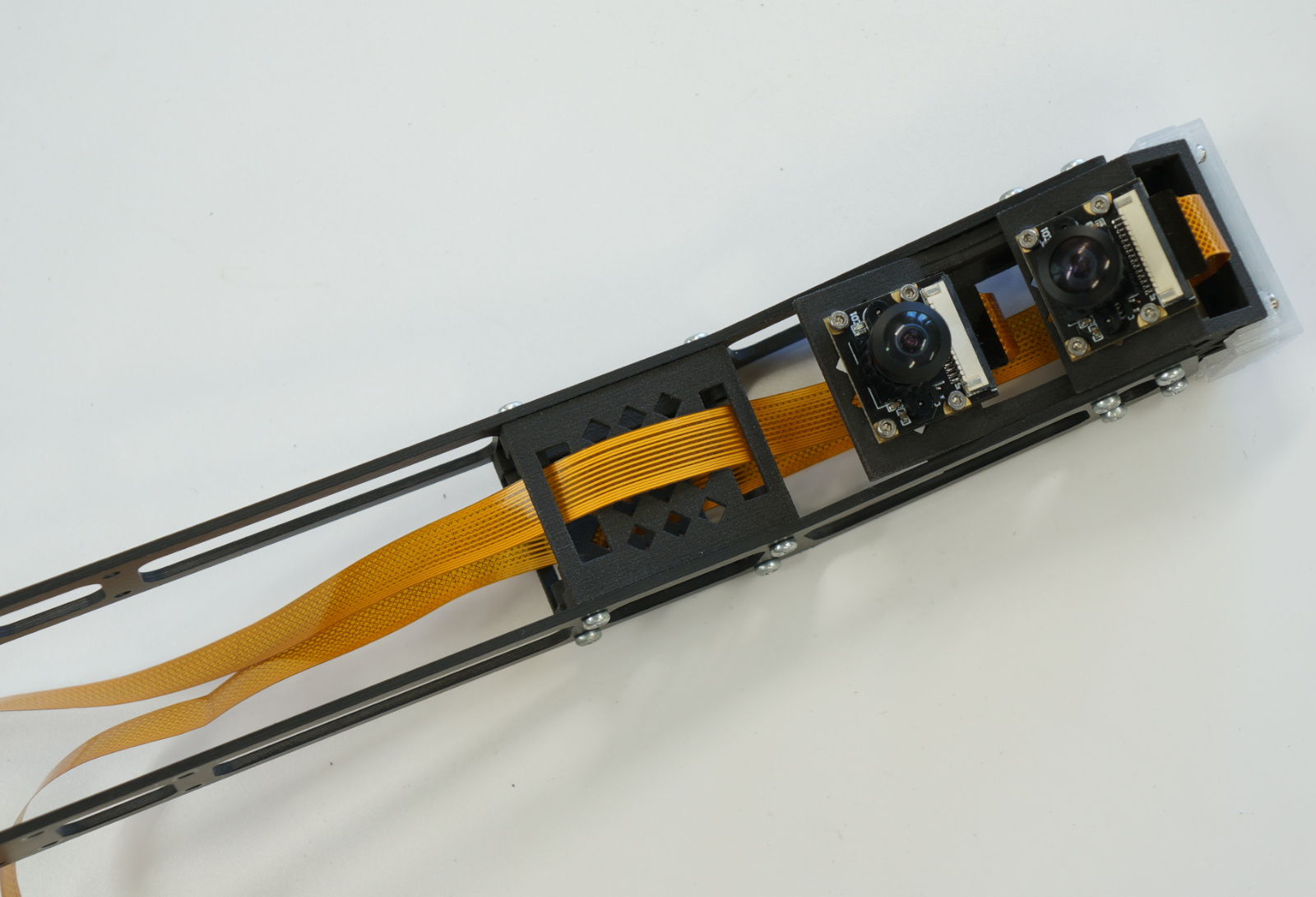
2個のCSIカメラとCSIケーブルを取り付けます。(幅が広い15ピンの方をCSIカメラに取り付けます。幅が狭い方22ピンはJetson側となります。)

CSIカメラケーブルにCSIカメラを取り付け、以下のようにカメラを通します。
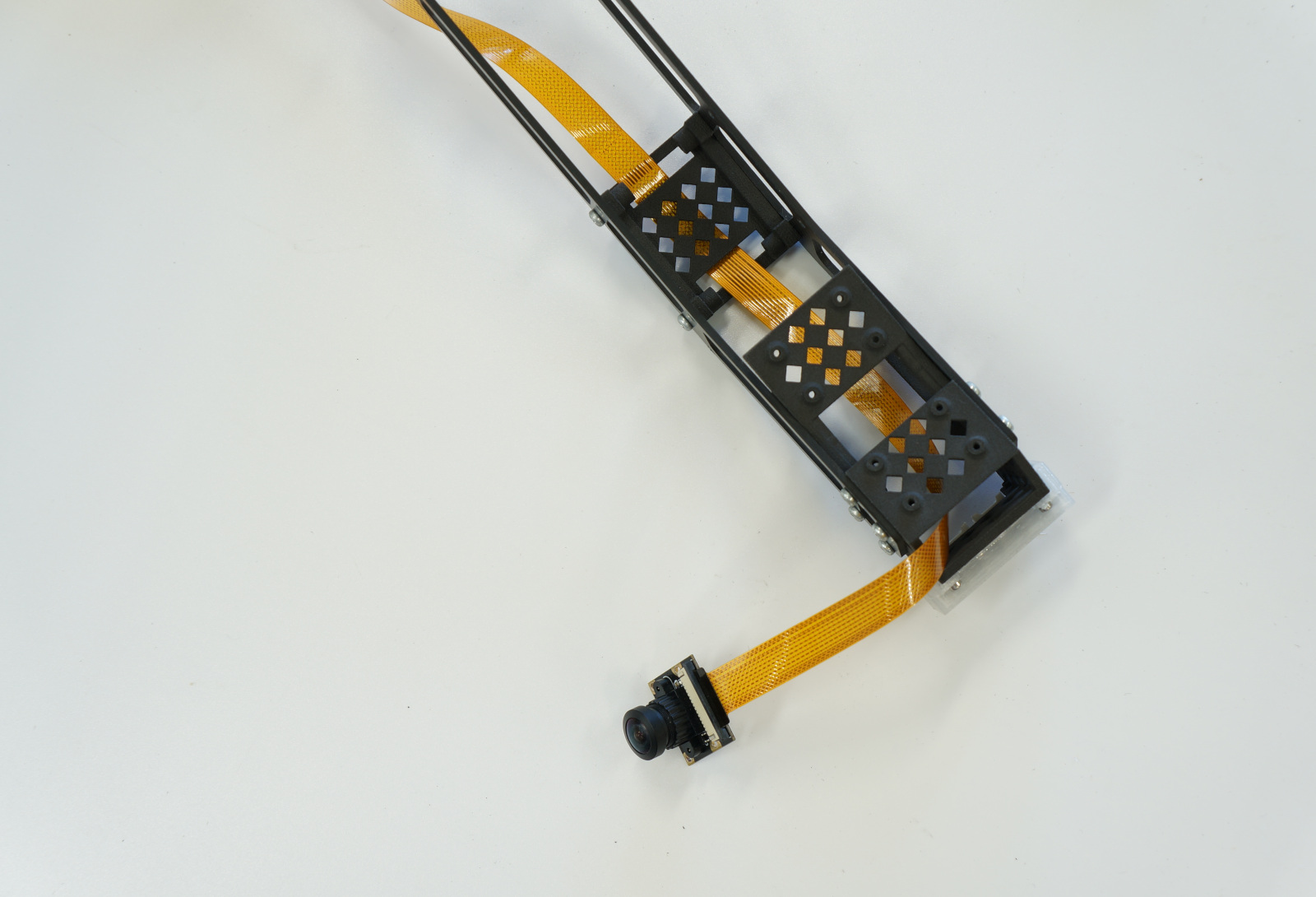
下記のようにカメラを取り付けします。
タッピングビスM2 x 6 4本でCSIカメラをカメラマウントに取り付けます。

同じよう2台目のCSIカメラをCSIカメラケーブルに取り付けます。
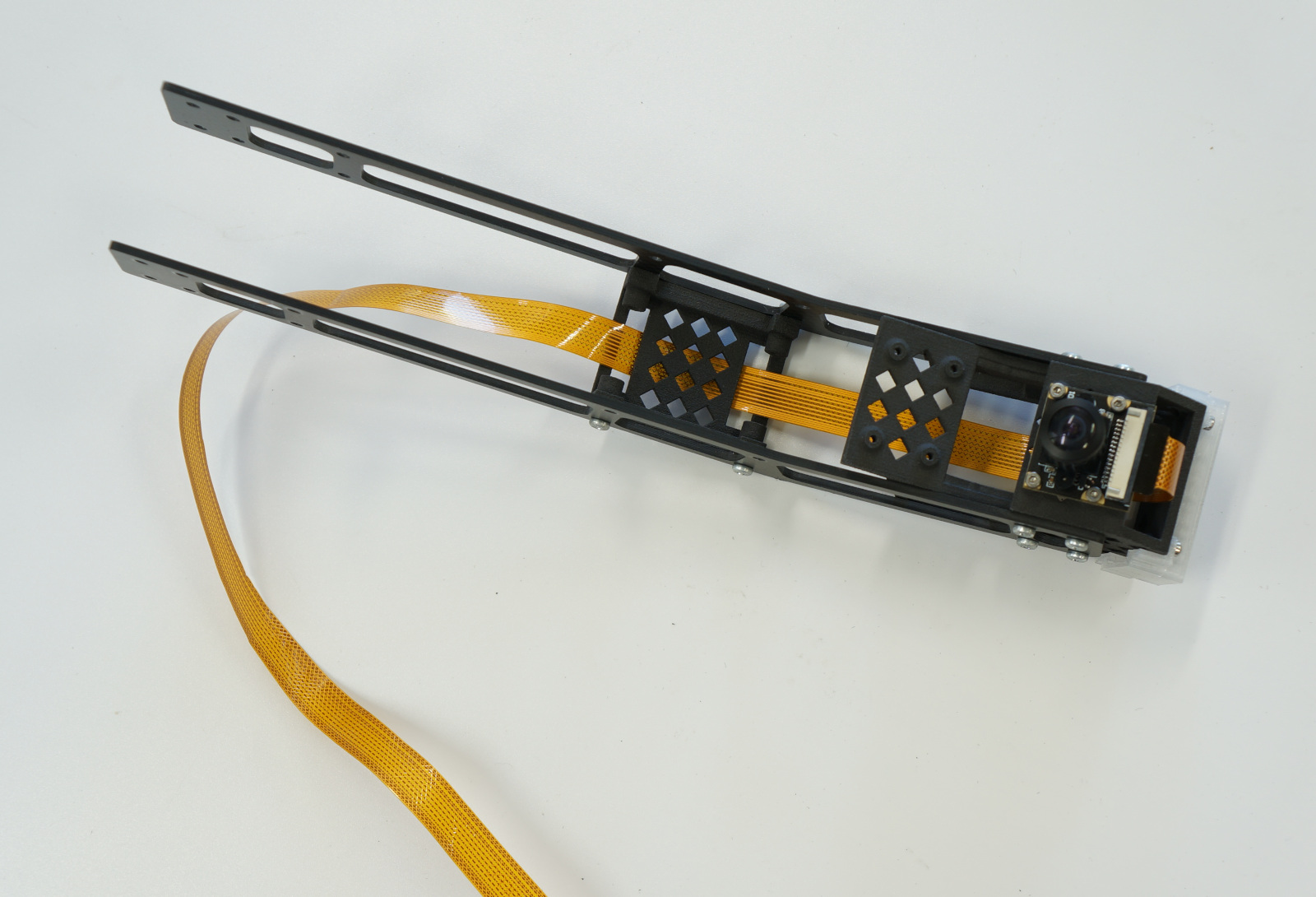
2台目のカメラカーブルは以下のようにCSIケーブルをケーブルホルダに通します。
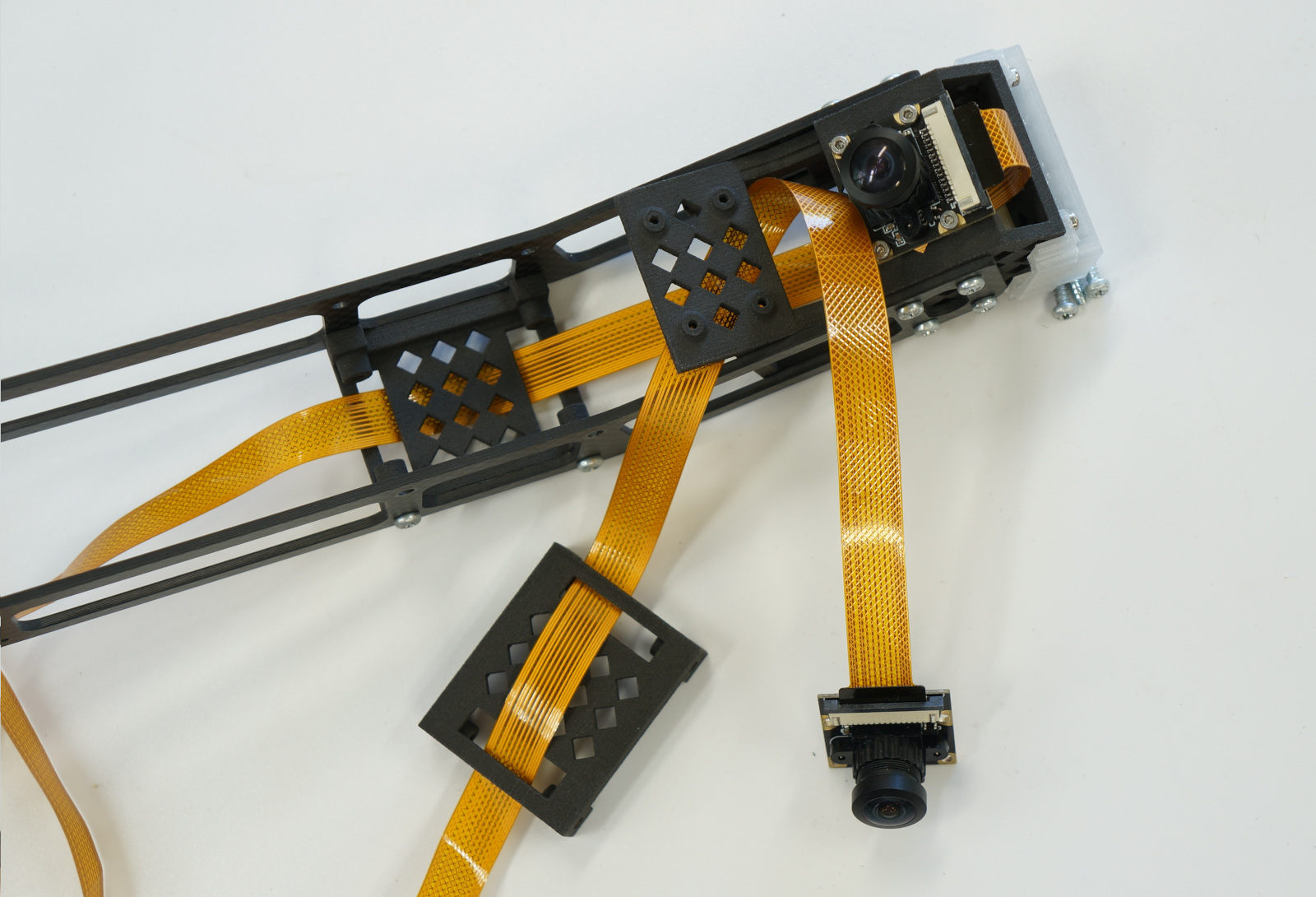
CSIカメラをタッピングビスM2 x 6 4本で固定します。
残りのカメラホルダーを取り付けます。
カメラ部完成の様子。
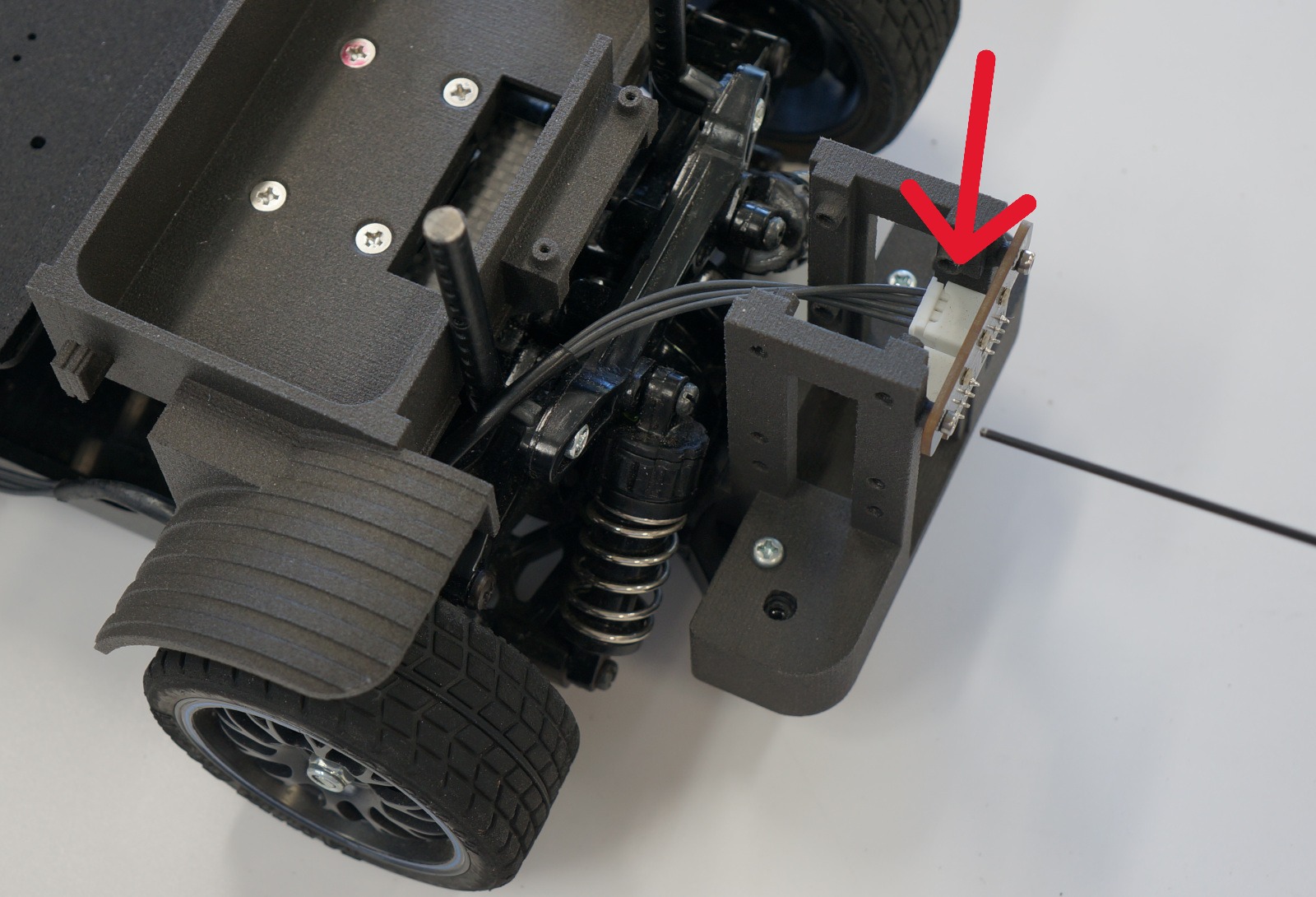
LEDケーブル短い方24cm(4pin)をLEDボードのSPI_INPUT側に接続します。
LEDボードを取り付けます。LEDケーブル長い方28cm(4pin)をSPI_INPUT側に接続し、カメラベースに取り付け、LEDボードを下のようにタッピングM2 x 6を使い固定取り付けします。
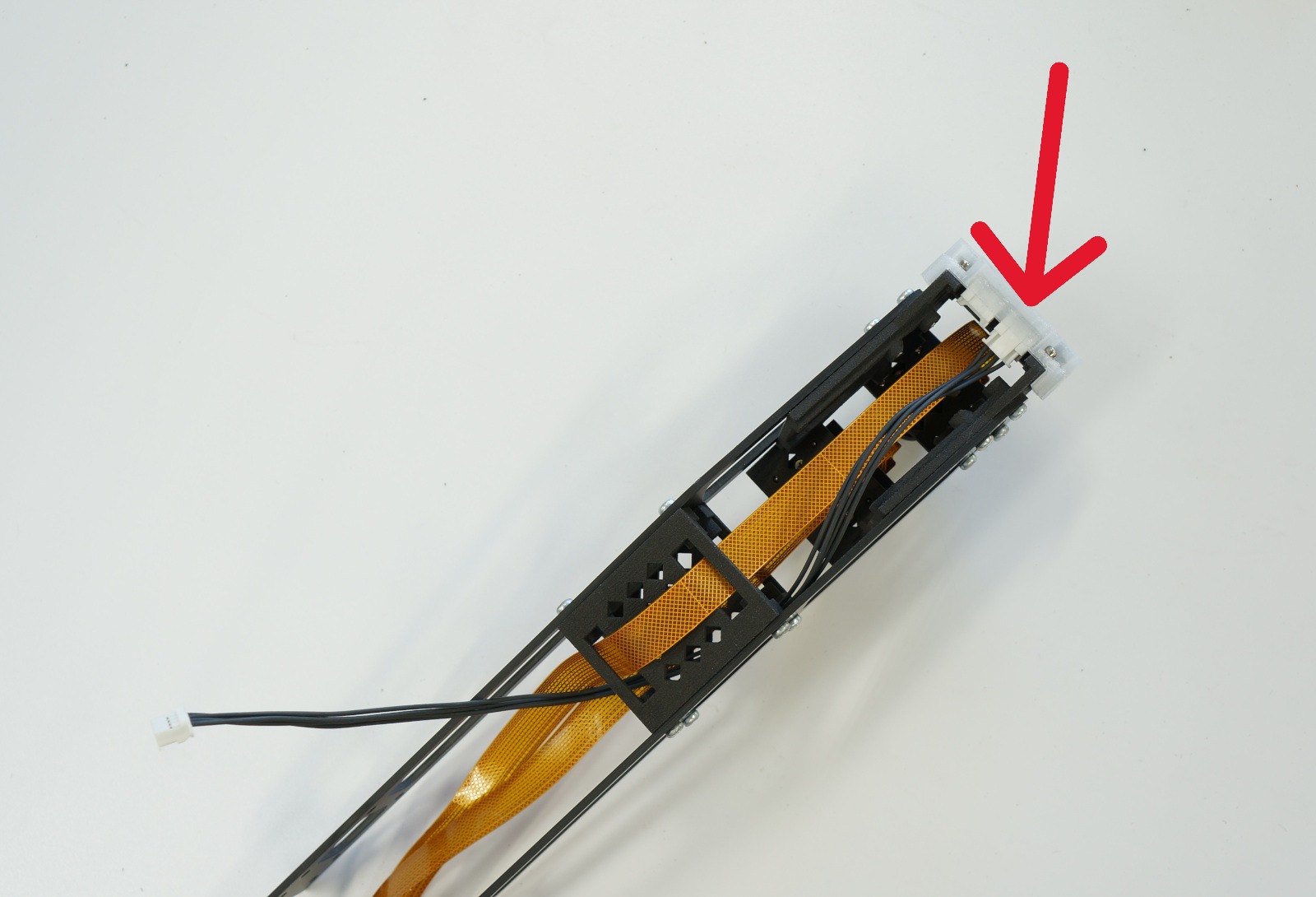
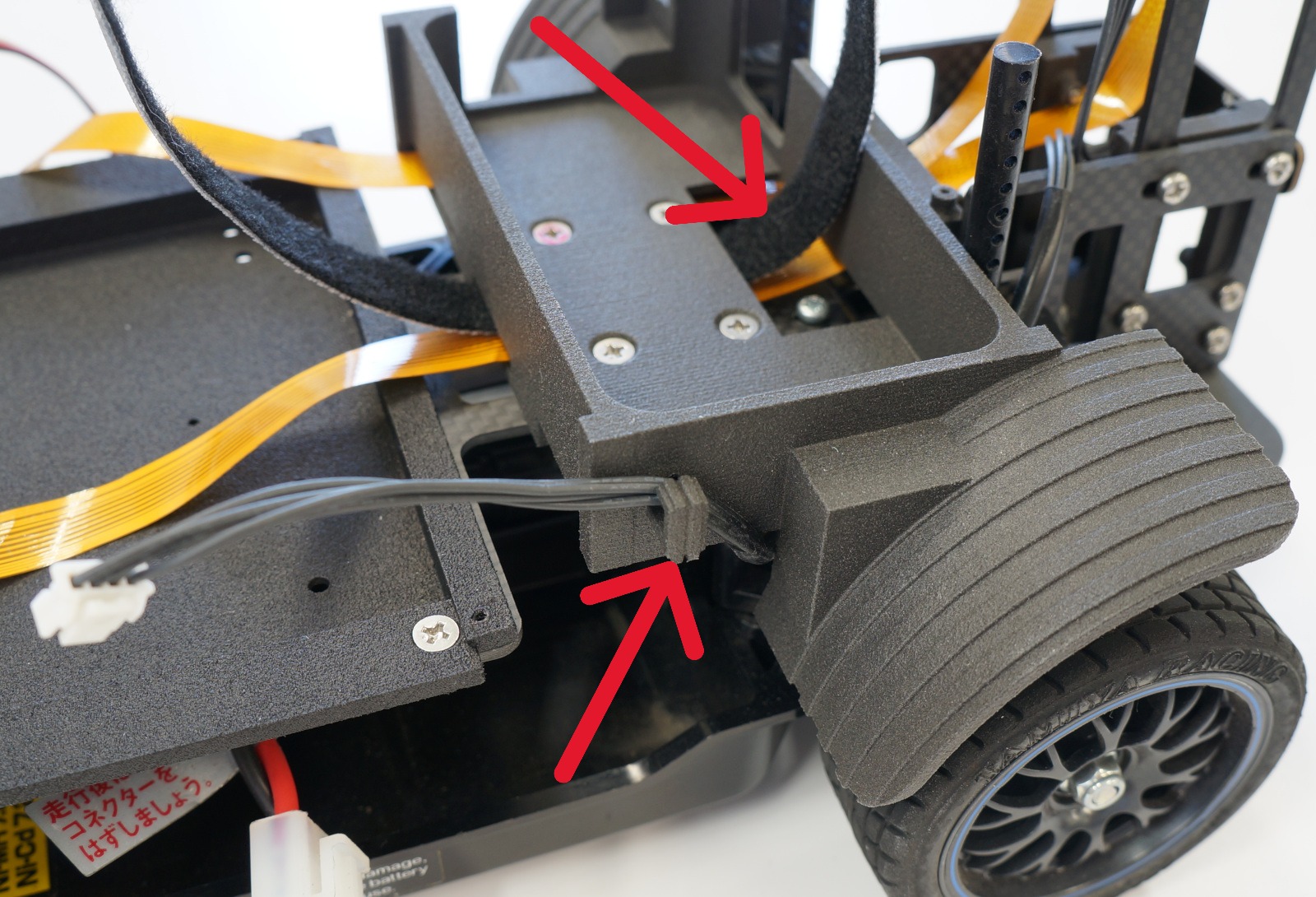
CSIカメラケーブルをバックマウントの中を貫通している穴にそれぞれ2つのカメラケーブルを通します。

、上部LEDボードとの接続は、SPI_OUTPUT側に接続します。
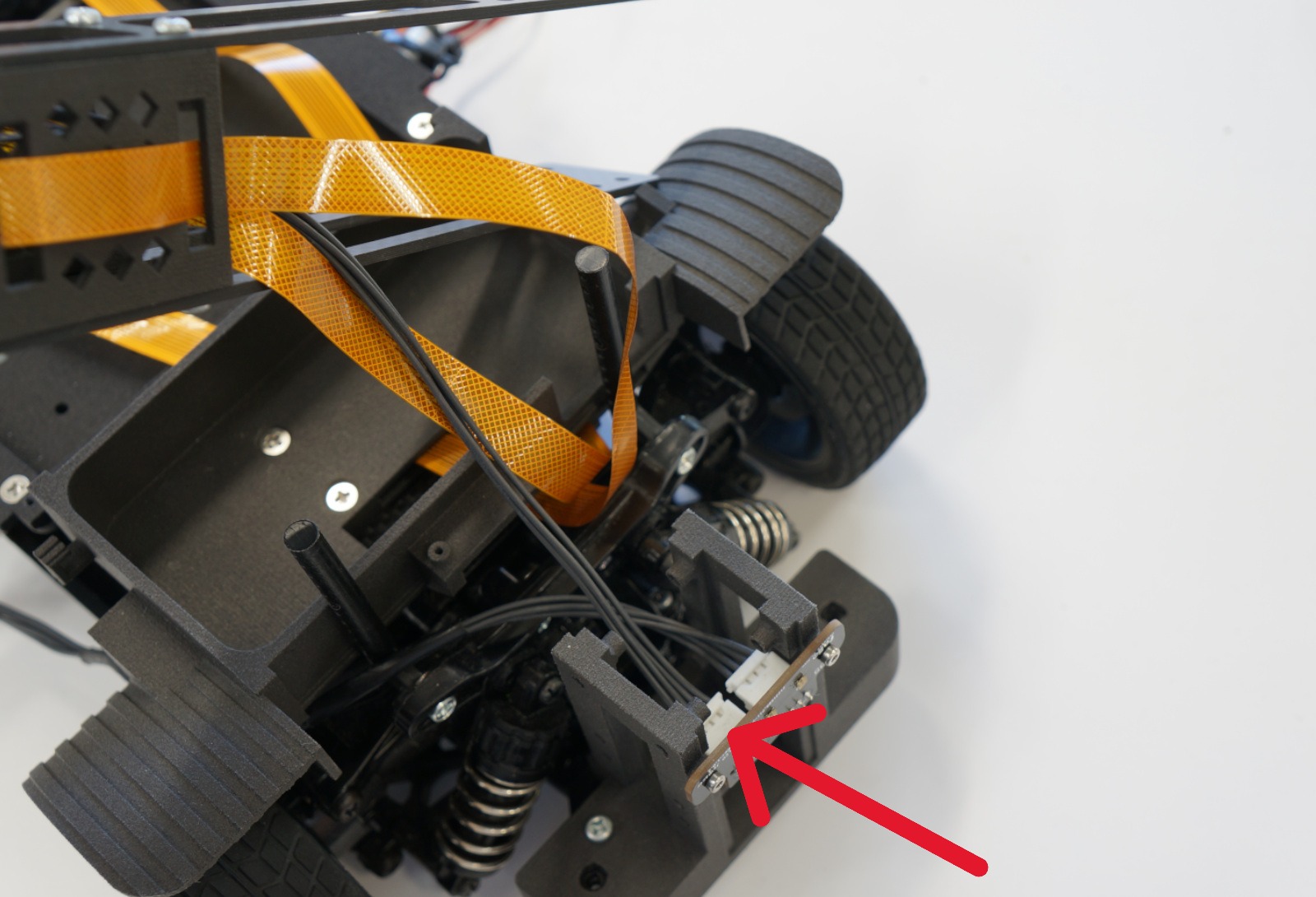
マジックバンドもバックマウント内部に通します。LEDケーブル(4Pin)はバックマウント側面にあるフックに引っ掛けます。
カメラベースと固定します。
もう一方も、カメラベースと固定します。
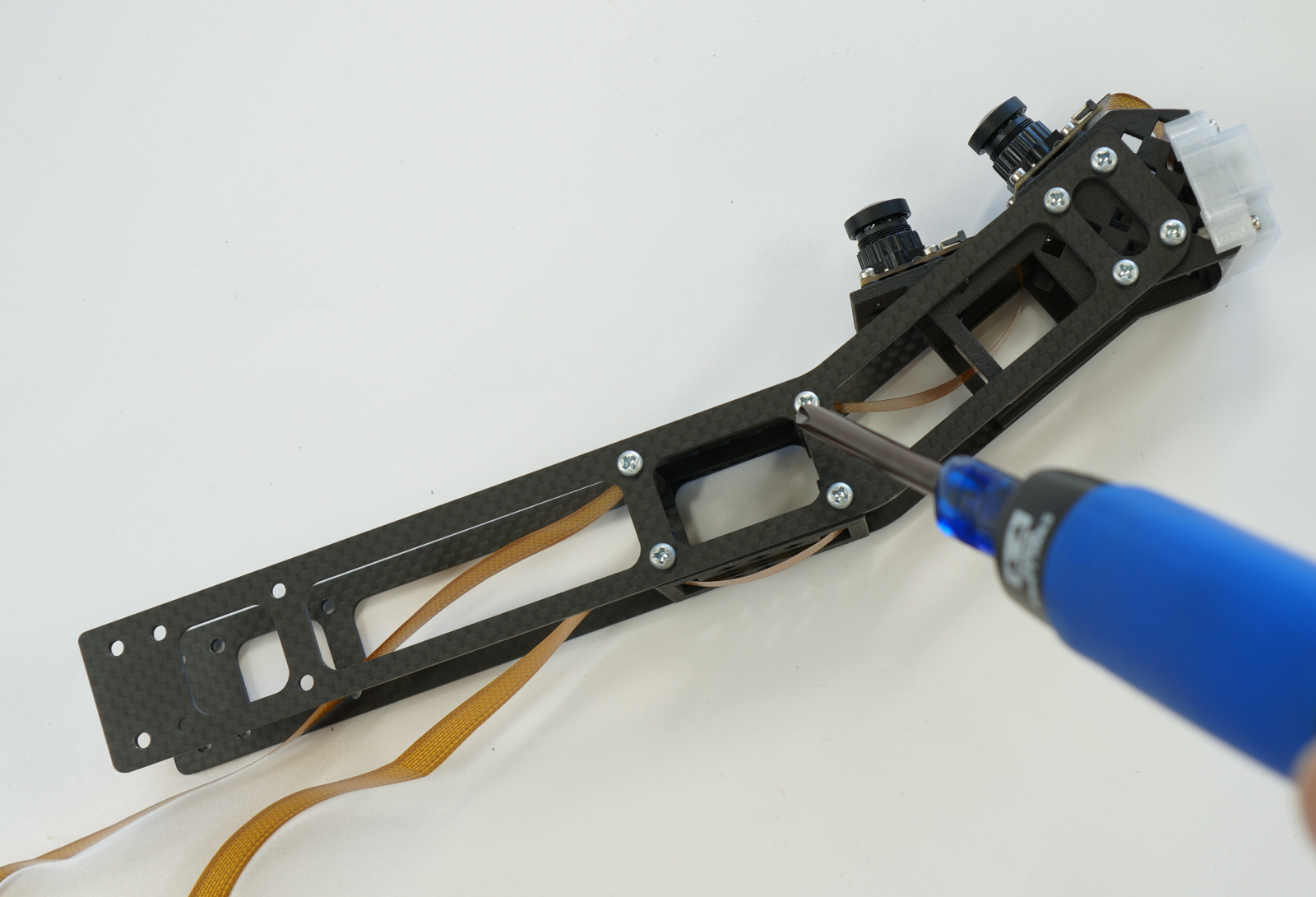
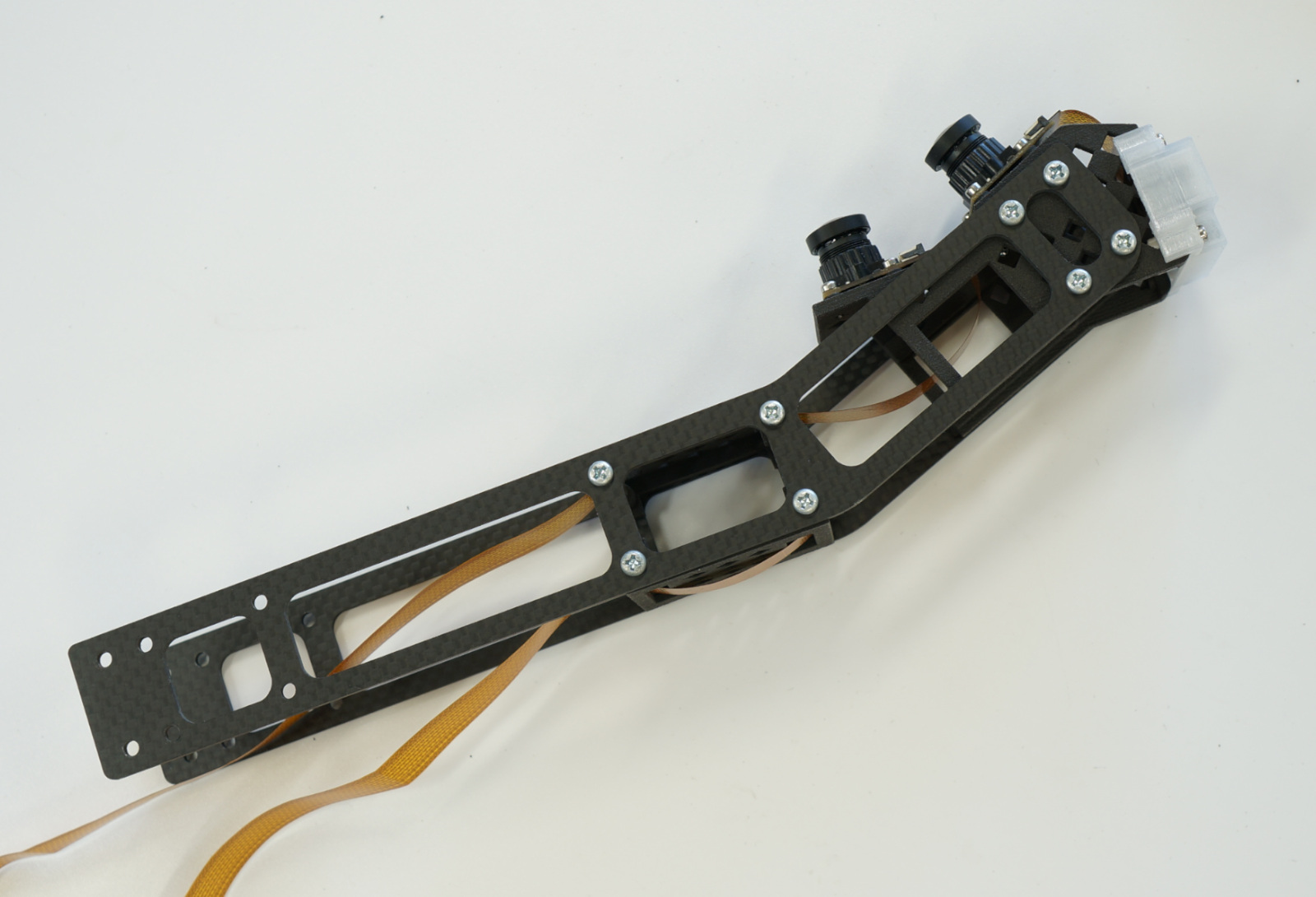
カメラブレを防止するカメラ固定を取り付けます。
もう一方も、カメラブレを防止するカメラ固定を取り付けます。
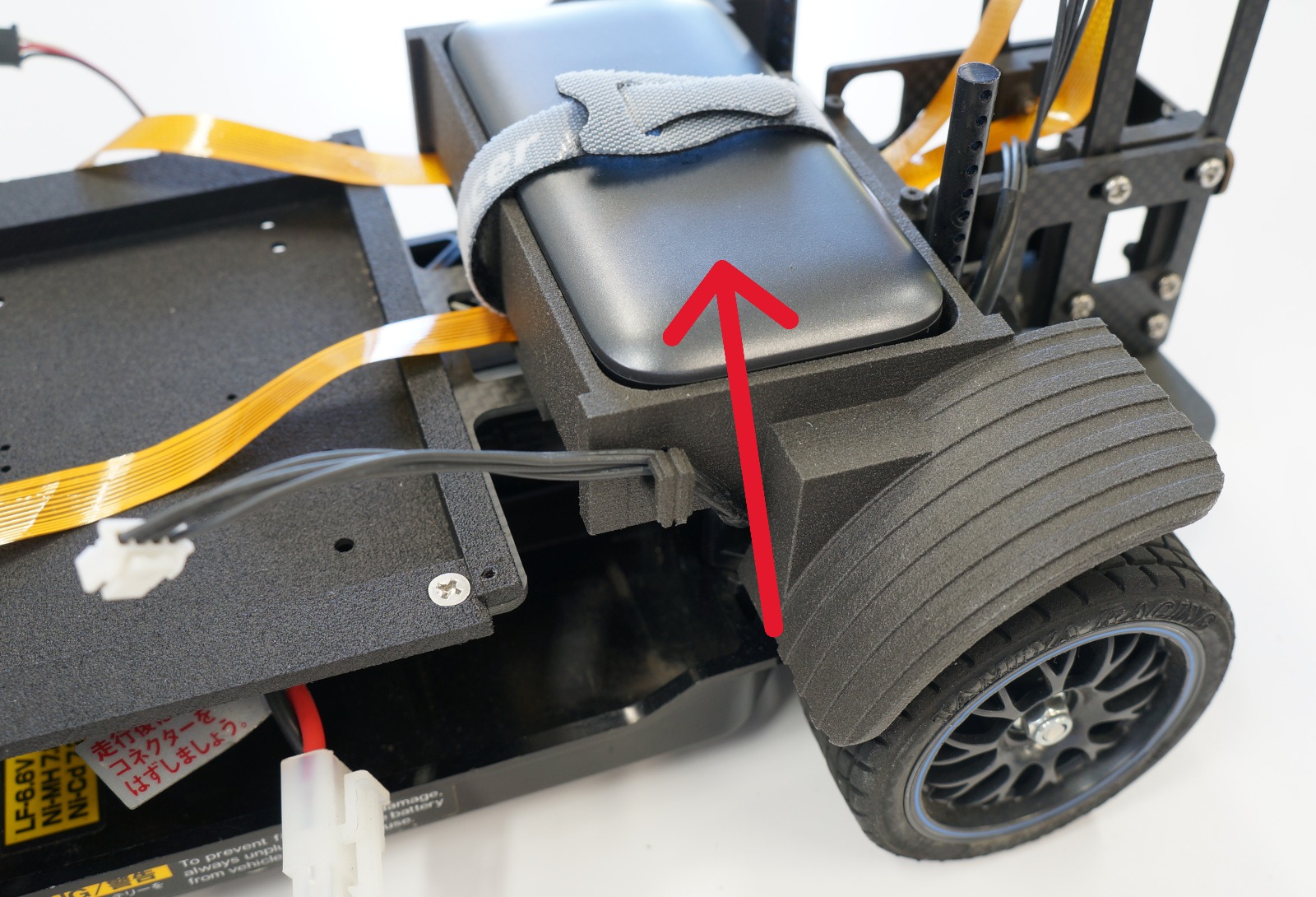
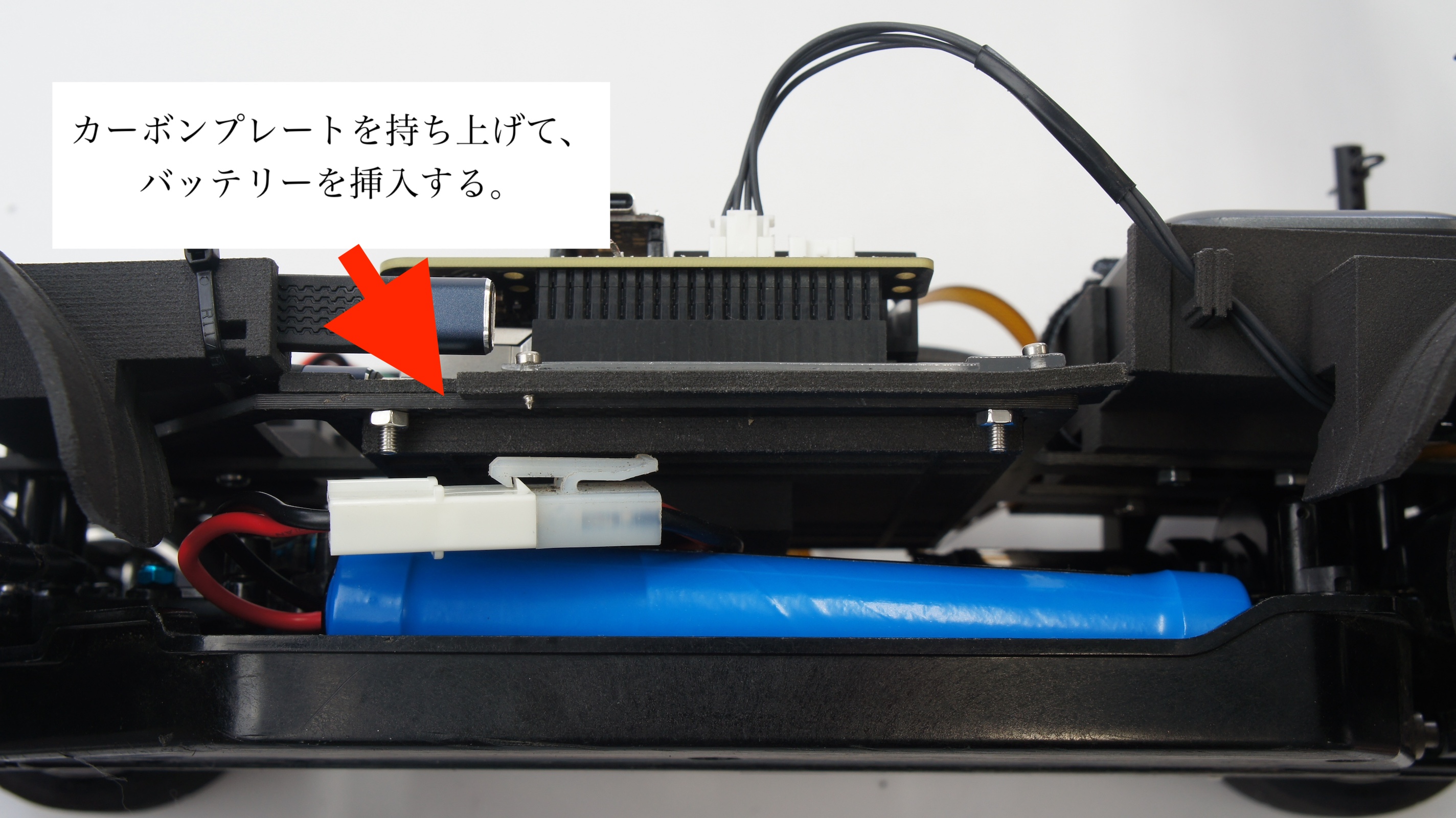
モバイルバッテリーを装着し、マジックバンドで固定します。
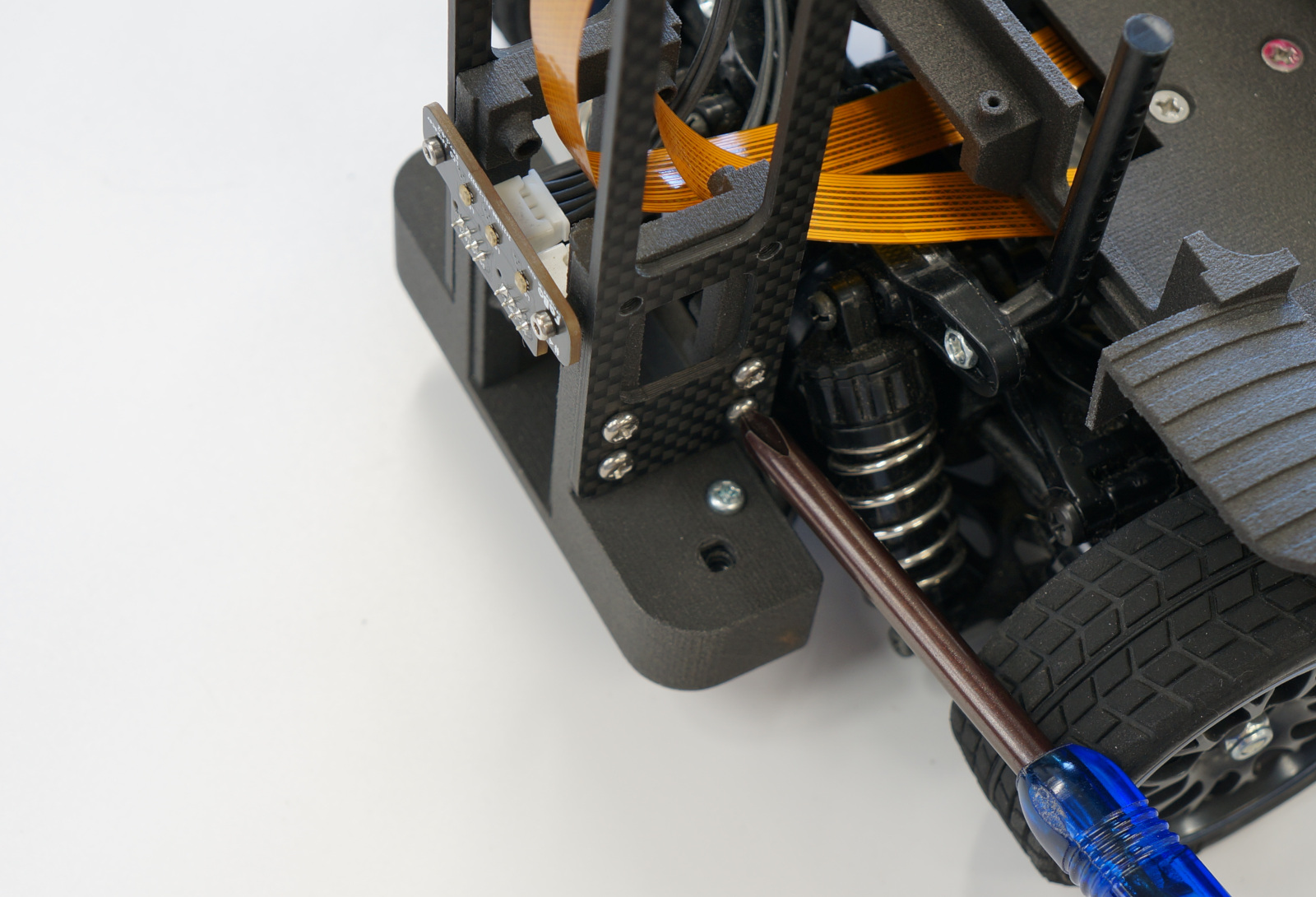
反対側も同じくカメラ固定パーツをRCカーのダンパープレートと取り付けます。(ねじ締めすぎに注意)
Jetson Orin Nano開発者キットを開封しマイクロSDカードをカードスロットへ挿入します。
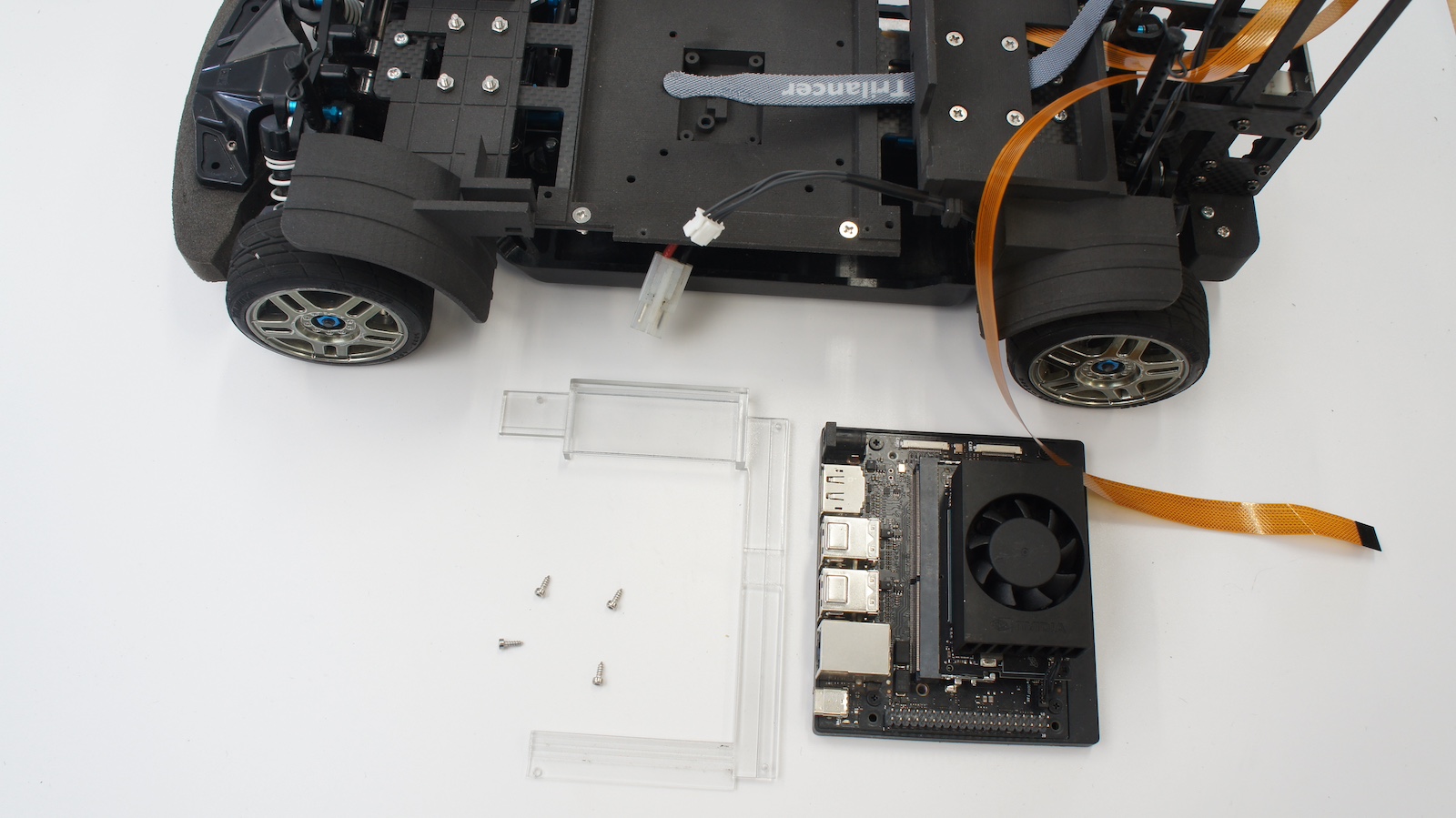
Jetson Orin Nanoを取り付けます。マイクロSDカードをあらかじめJetson Orin NanoのSDカードスロットに挿入しておきます。マイクロSDカードはOSが入っていない場合は、ダウンロードセンターからSDカードイメージをダウンロードしSDカードにインストールしてください。
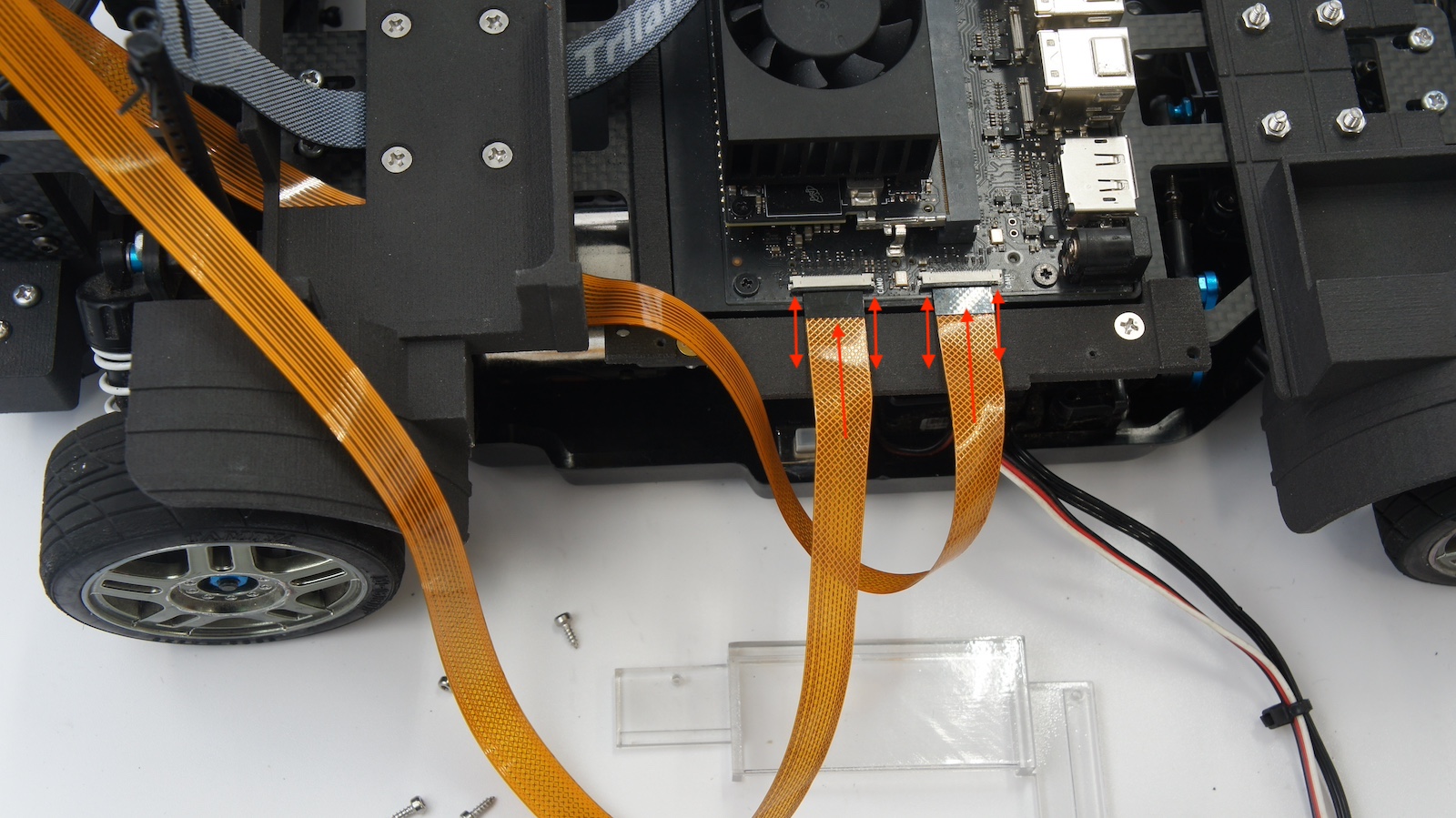
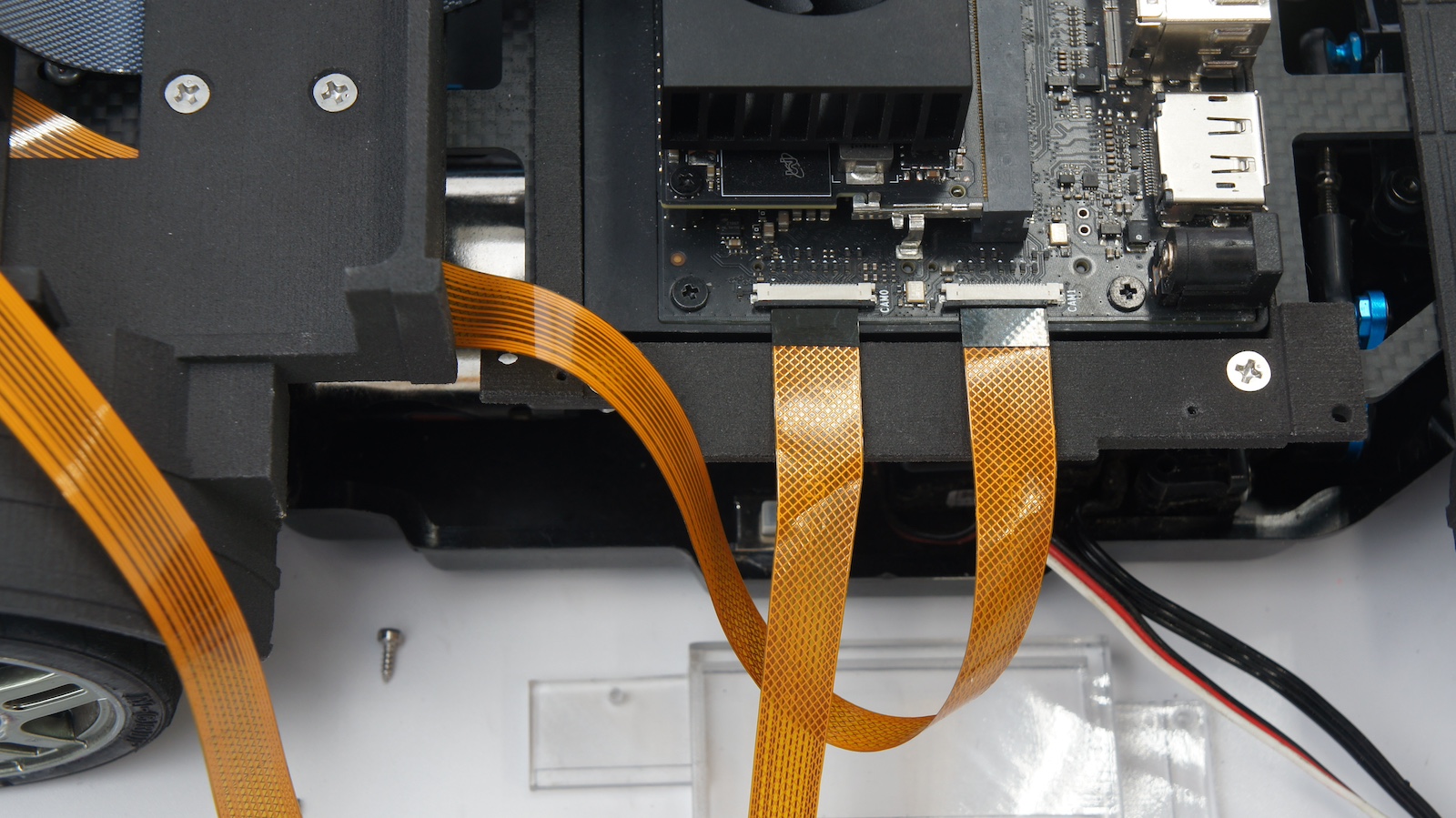
CAM0のケーブルは上側のカメラ、CAM1のケーブルは下側のカメラに接続してください。
Jetson Orin NanoをJetsonベースに載せ、CSIカメラケーブルをJetsonそれぞれCAM0,CAM1に接続します。FPCコネクタはとても壊れやすくやさしく取扱いご注意願います。(アクチュエーター引き出し時)
FPCコネクタの抑え部(黒い部分 アクチュエーター)は大変弱く、やさしく取り出し、ケーブルをコネクタに刺して再び戻してケーブルの接点と密着し取り付けます。
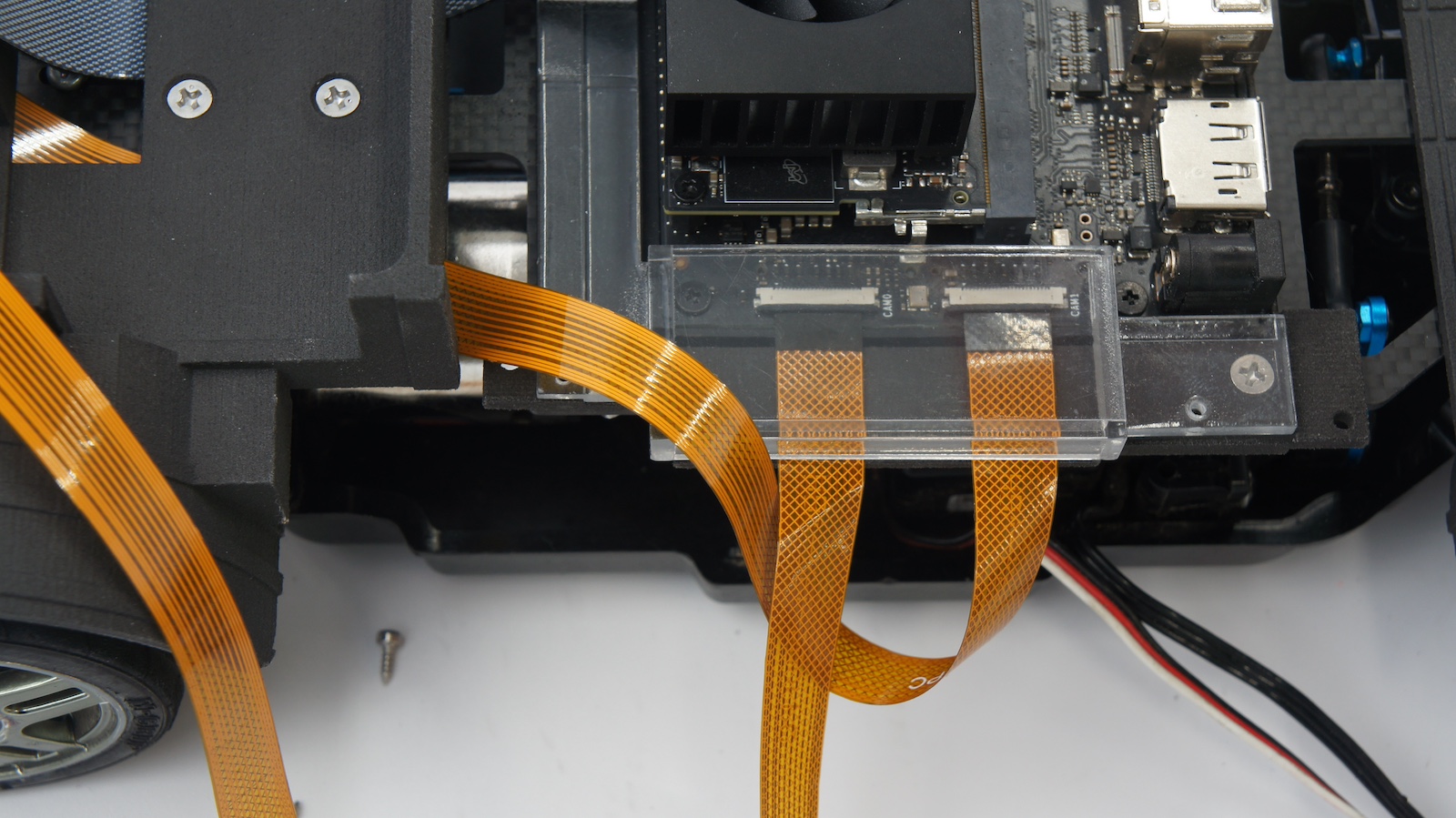
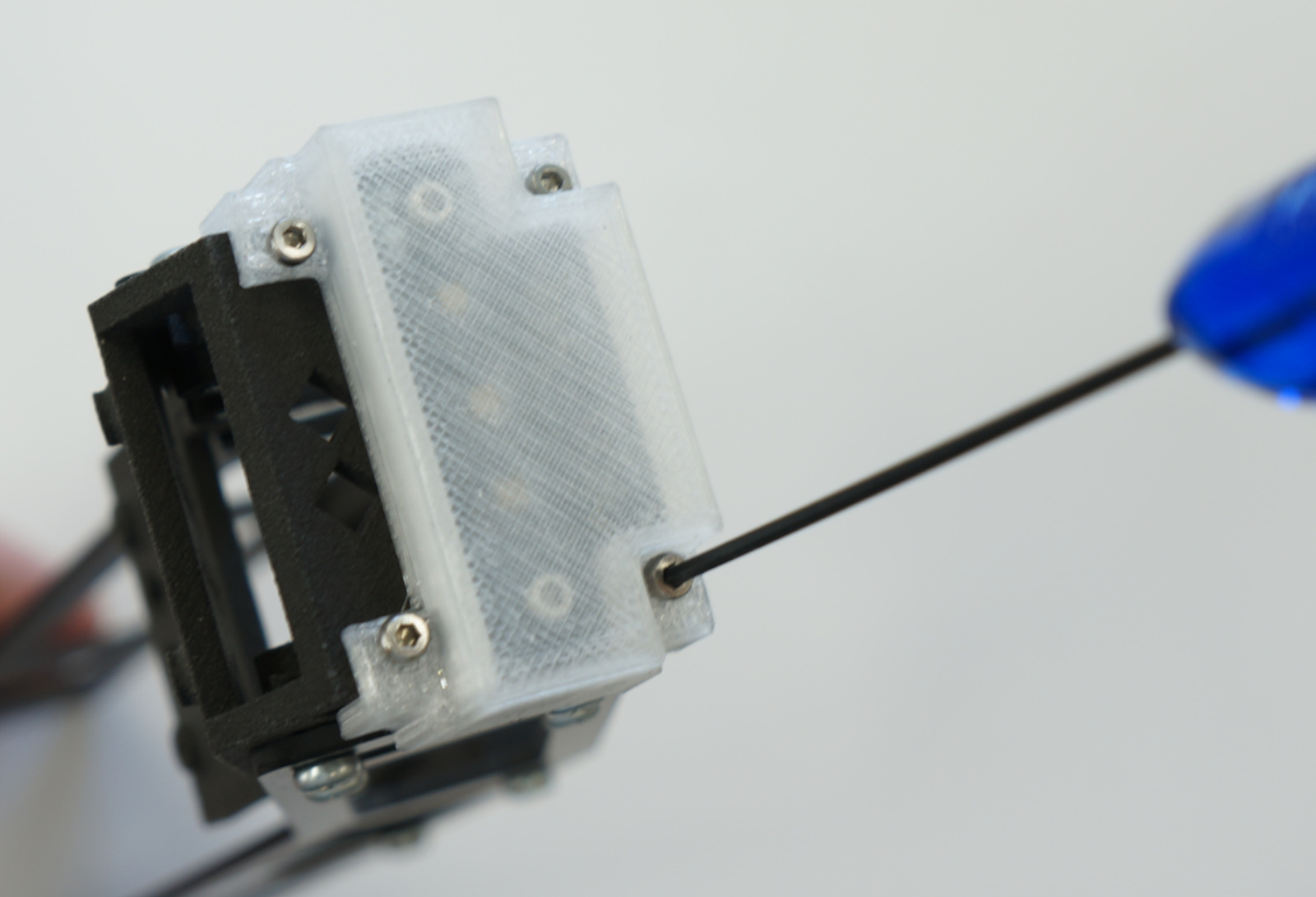
透明なカバーで取り付けます。
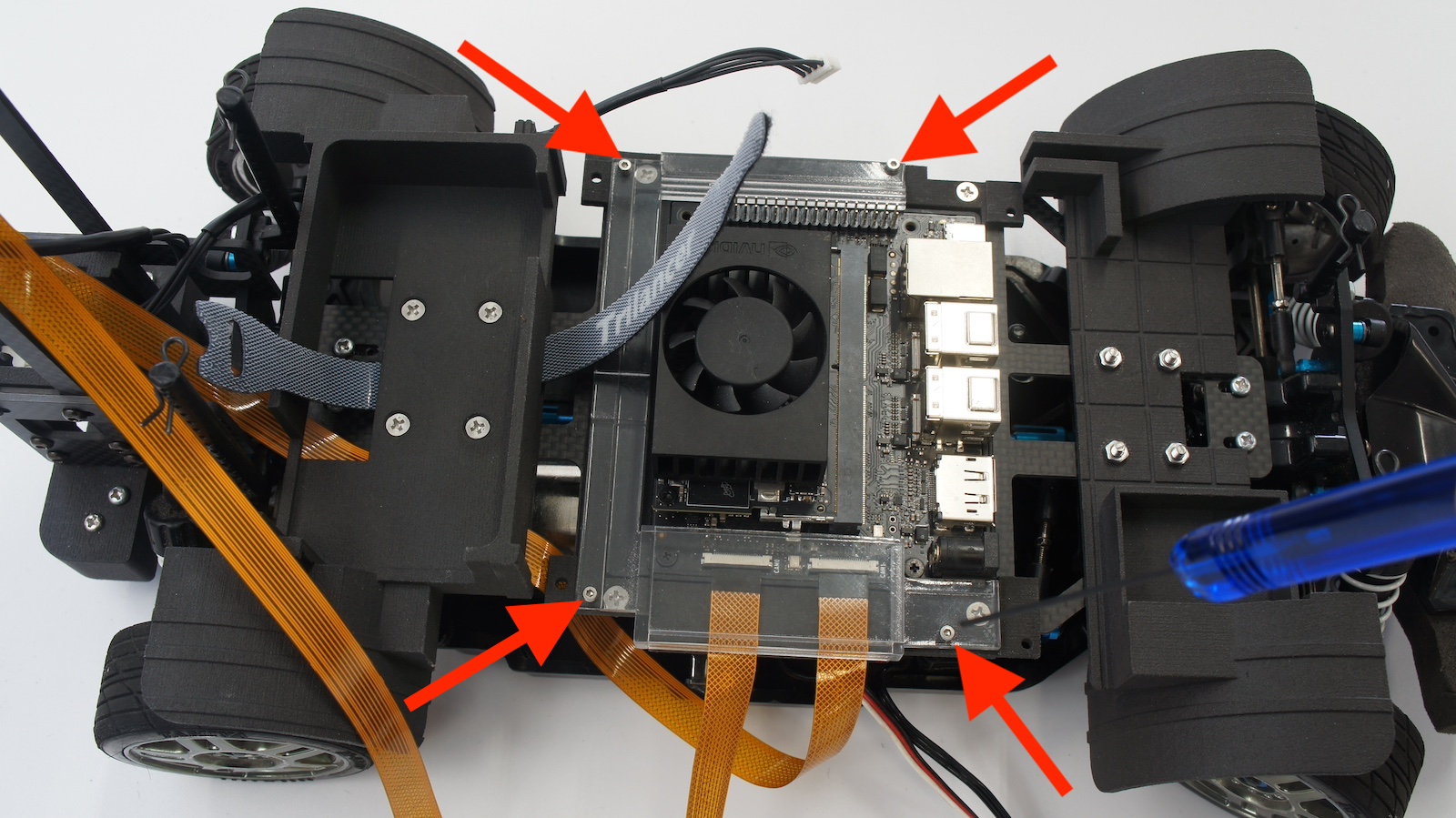
カバーを六角棒を使って、4箇所、ねじで取り付けます。
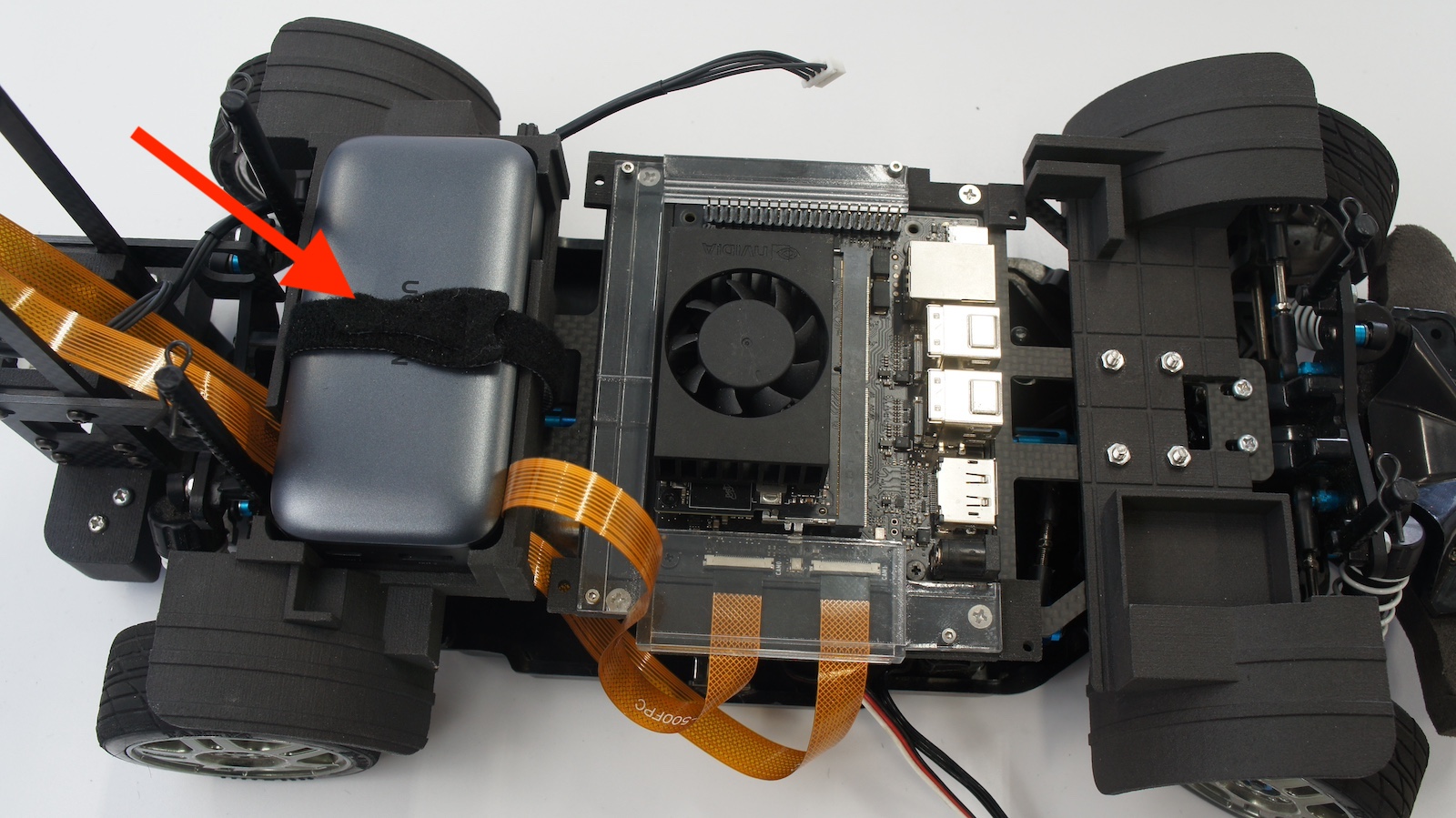
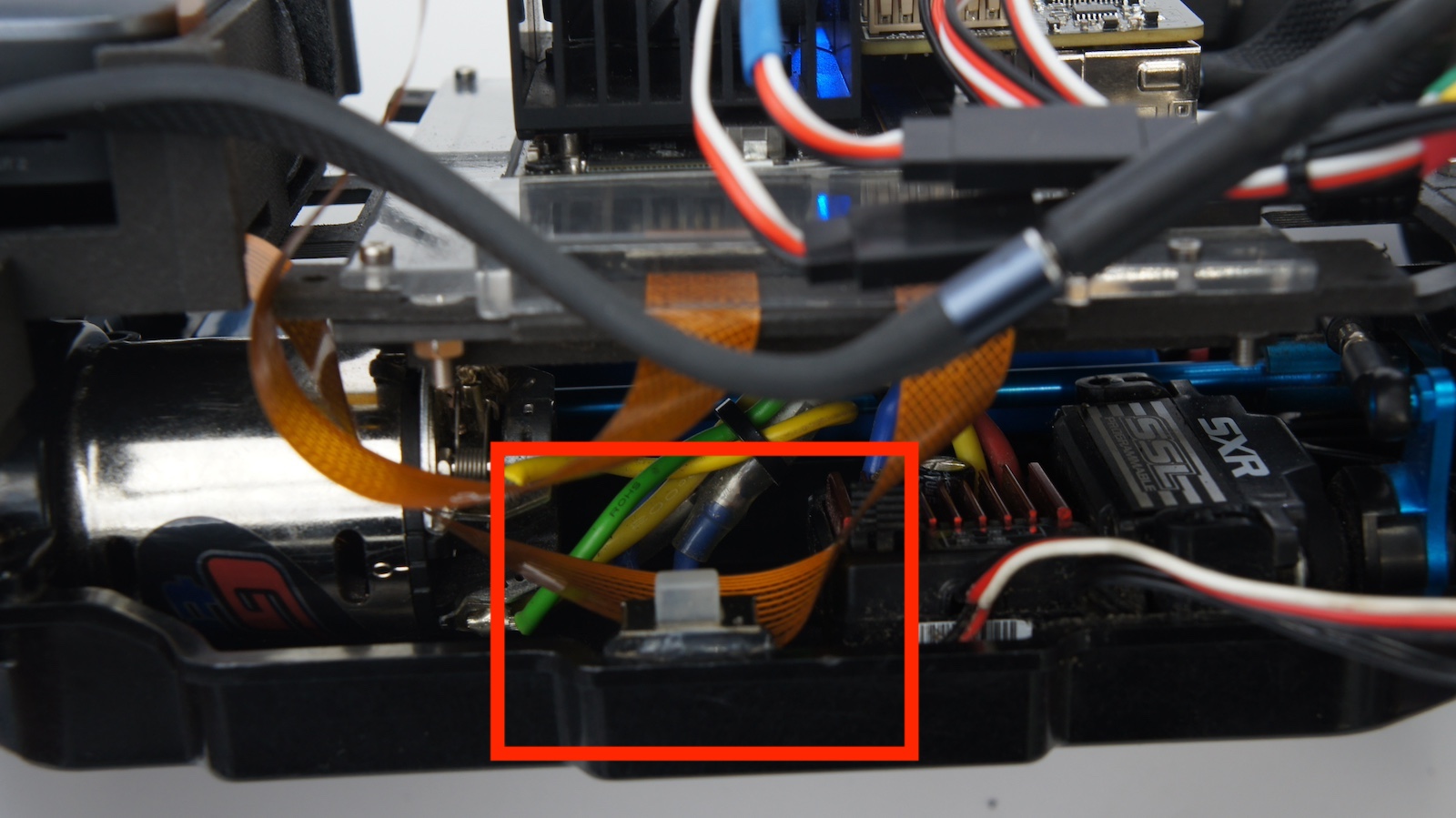
CSIカメラケーブルをバッテリーの下にして取り付けます。
両面テープを貼り付けます。
外しておいた受信機を取り付けます。
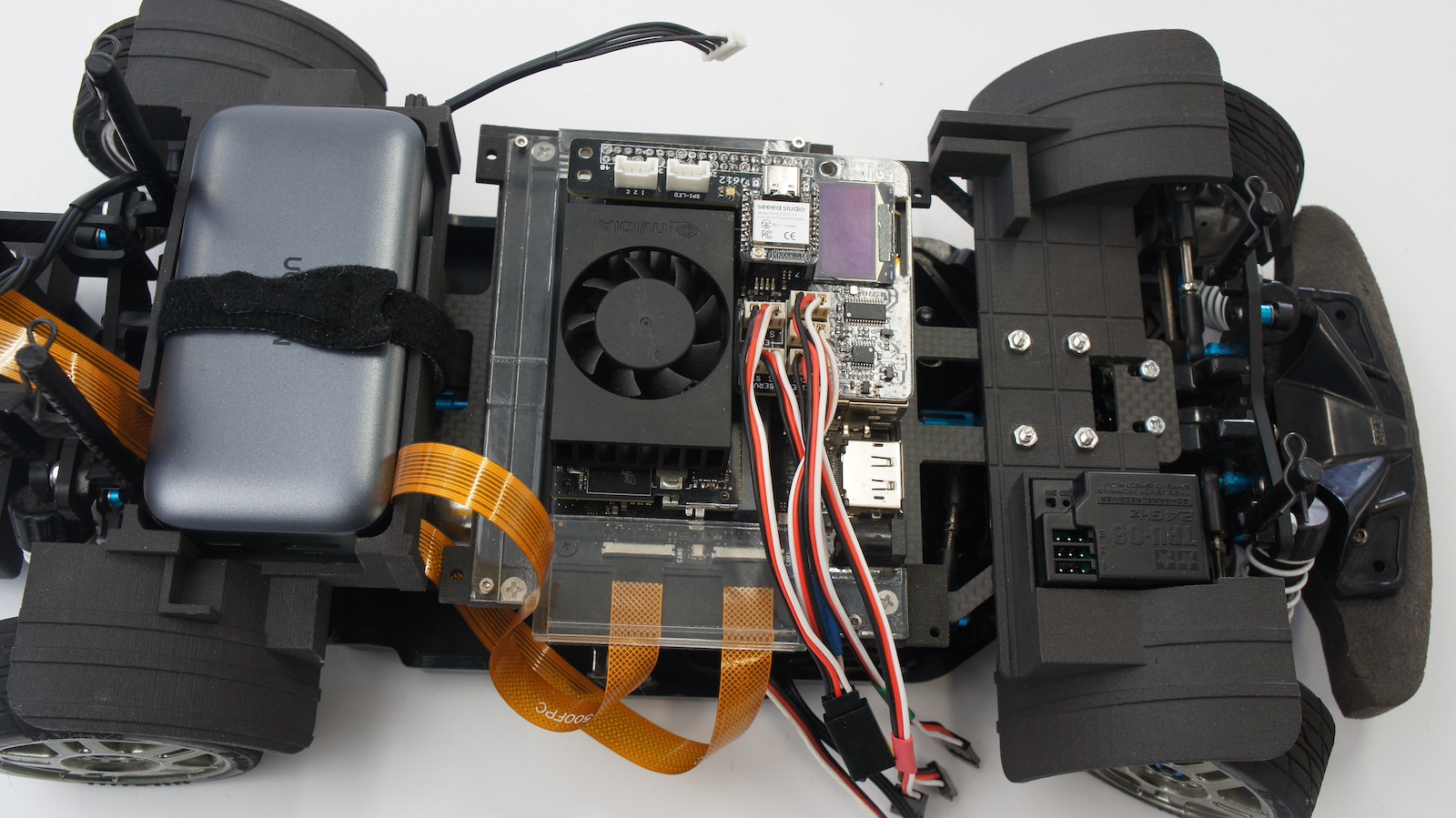
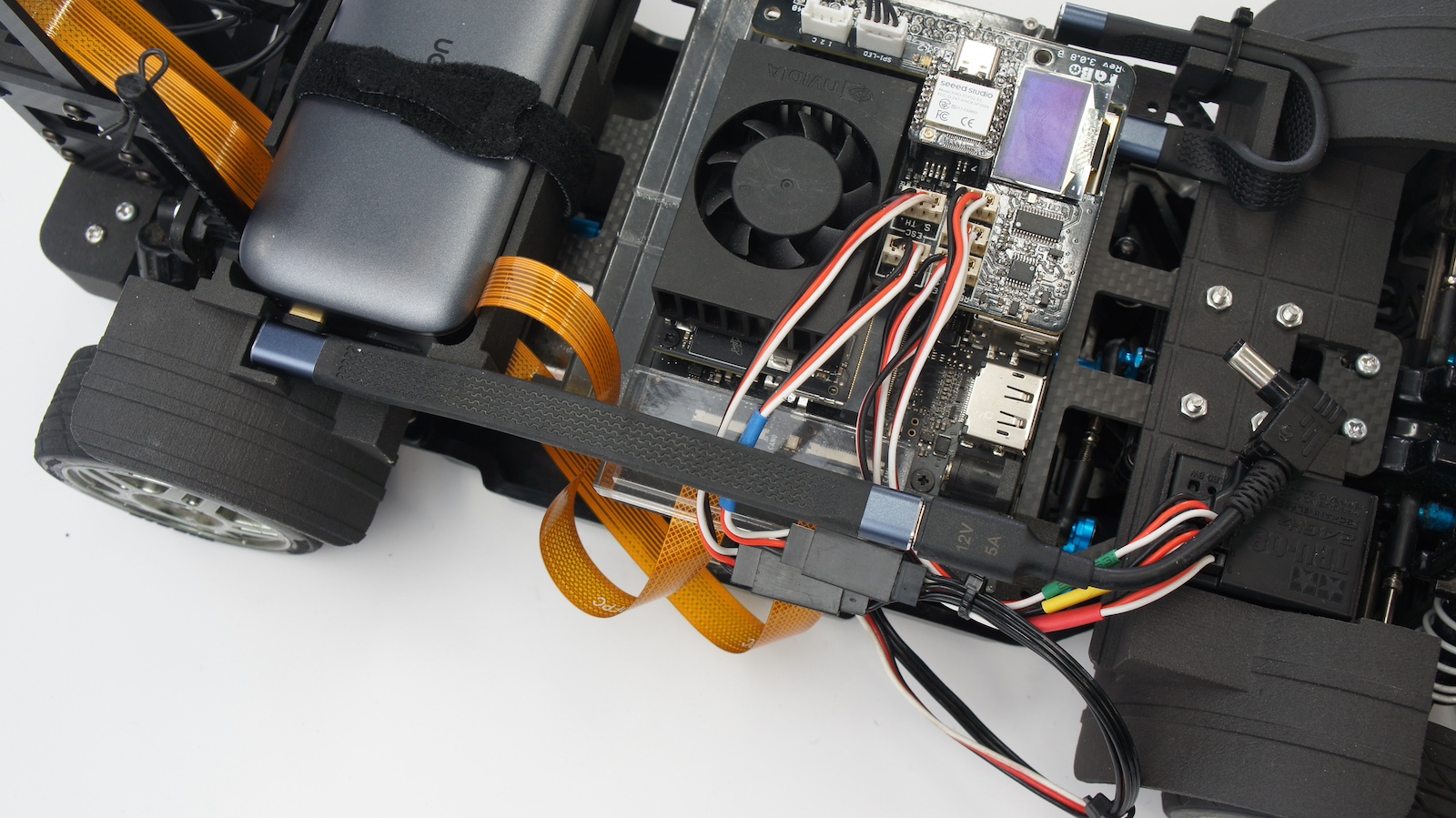
ずれて挿入しないように注意しながら、コントロール基板を取り付けます。
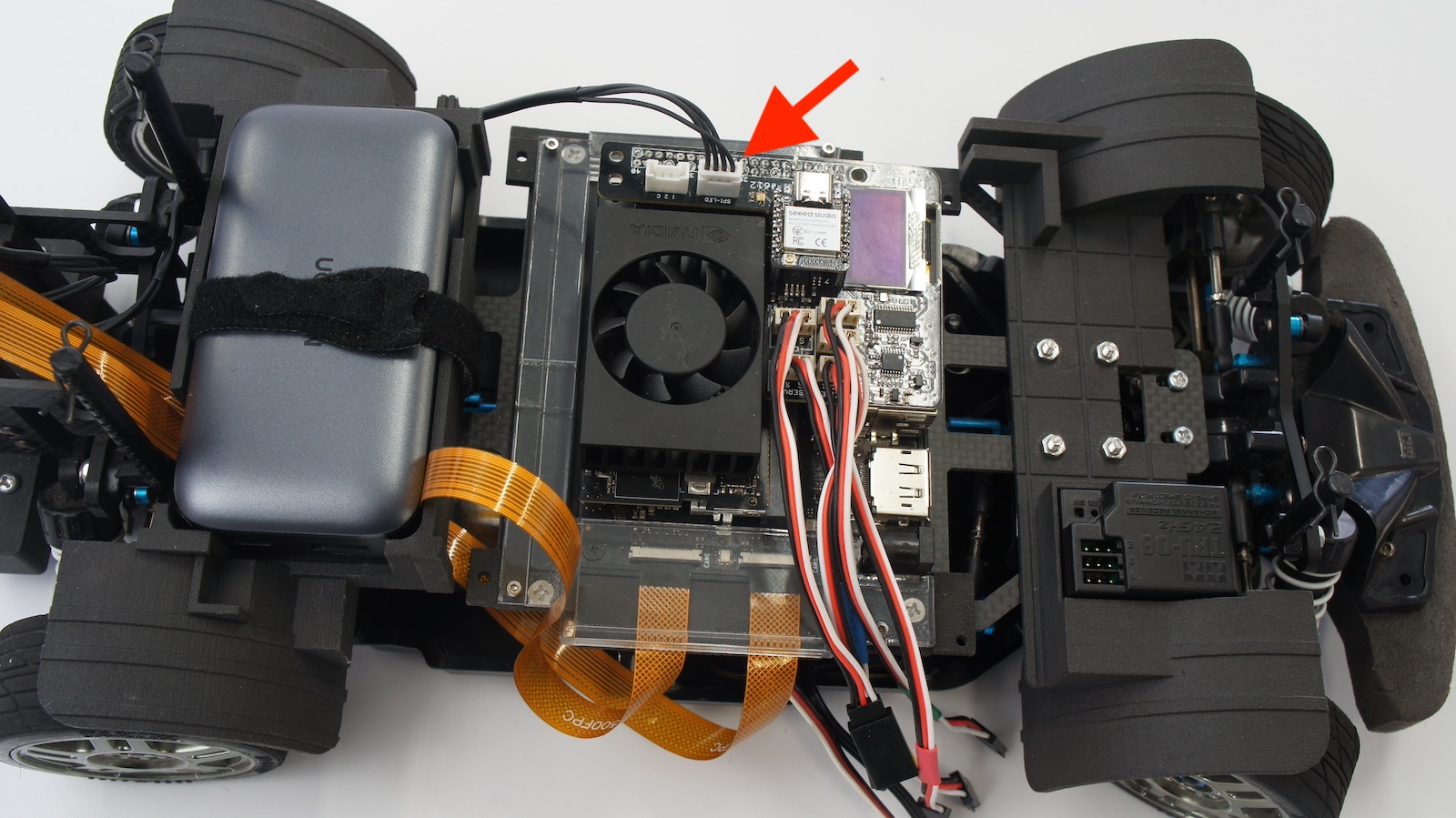
SPI-LEDのケーブルをコントロール基板のSPI-LEDコネクタと接続します。
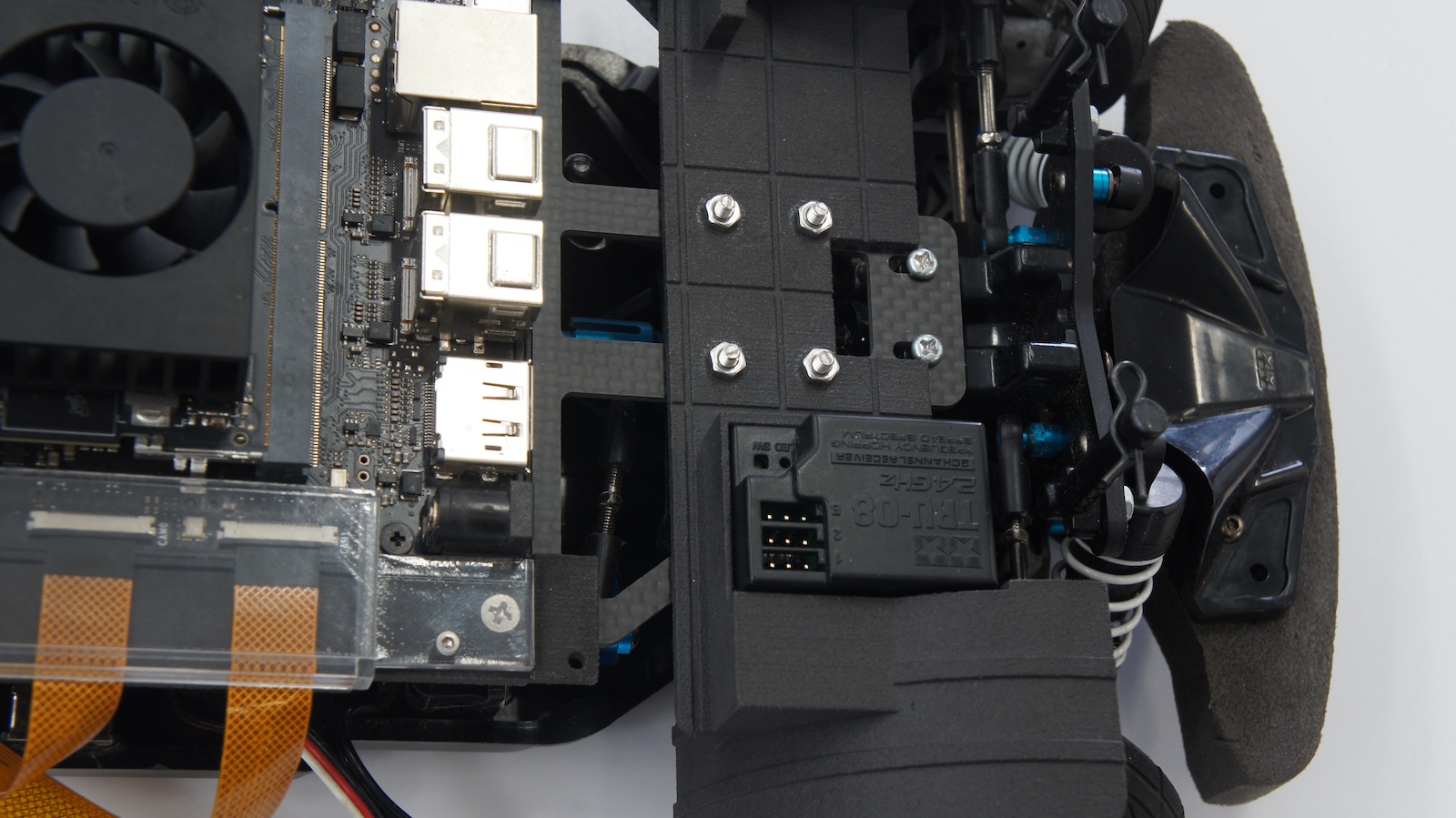
基板にある文字 1ch、2ch、3chは、タミヤの受信機1、2、Bにそれぞれ繋ぎます。
Servoはステアリングサーボに、ESCはRCカーのESC(スピードコントローラーに繋ぎます。)
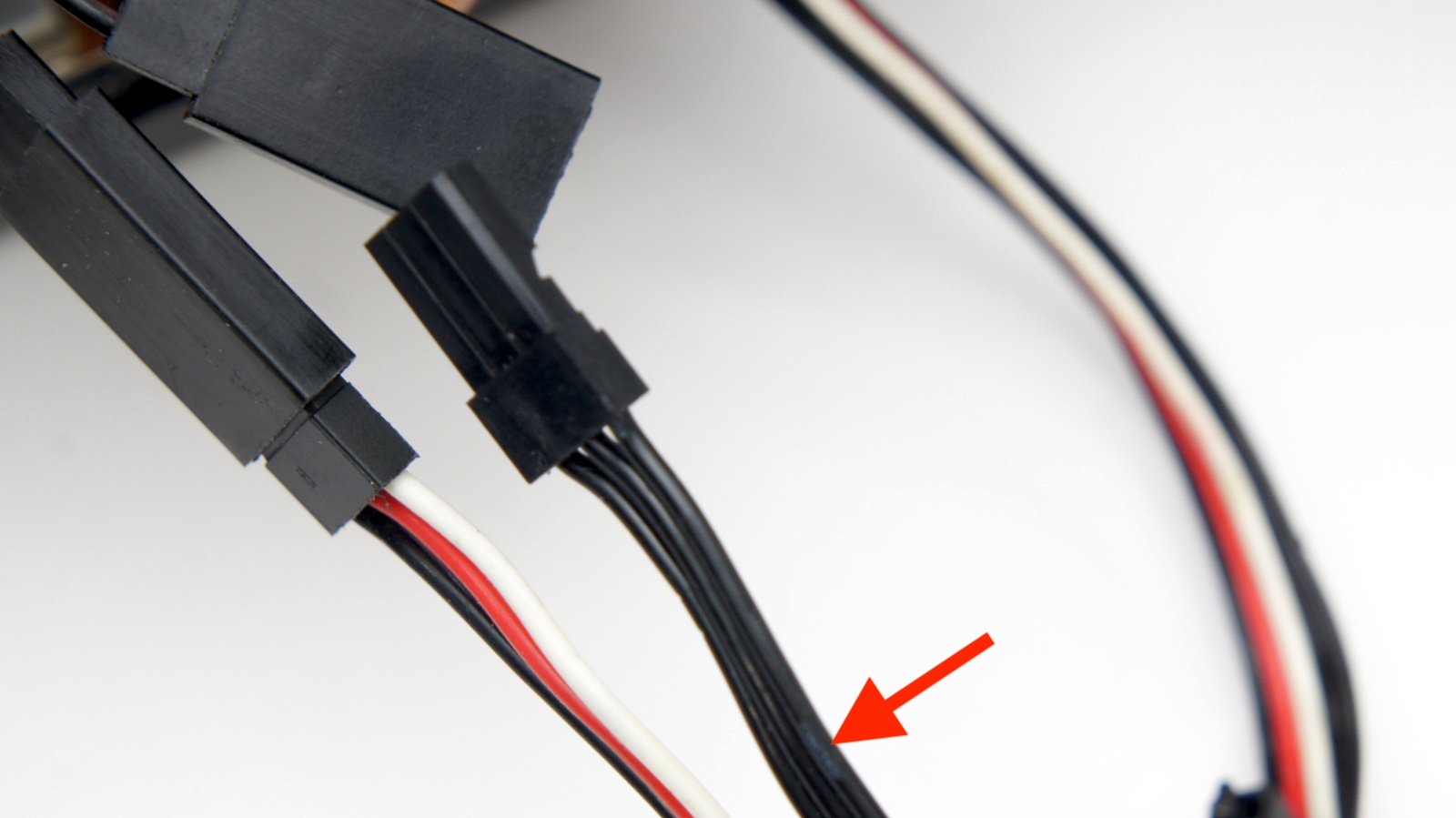
また、コネクタに爪がないタイプのお使いの方(サンワ製など)3本うち、上の写真に示すマークが信号線になりますので白線に繋いでください。XBは、サーボコネクタ、ESCのコネクタどちらも爪ありになります。
※極性を間違えないでください。(白線またはマークがあるもの:信号線、赤線:BEC電源、黒線:グラウンド)
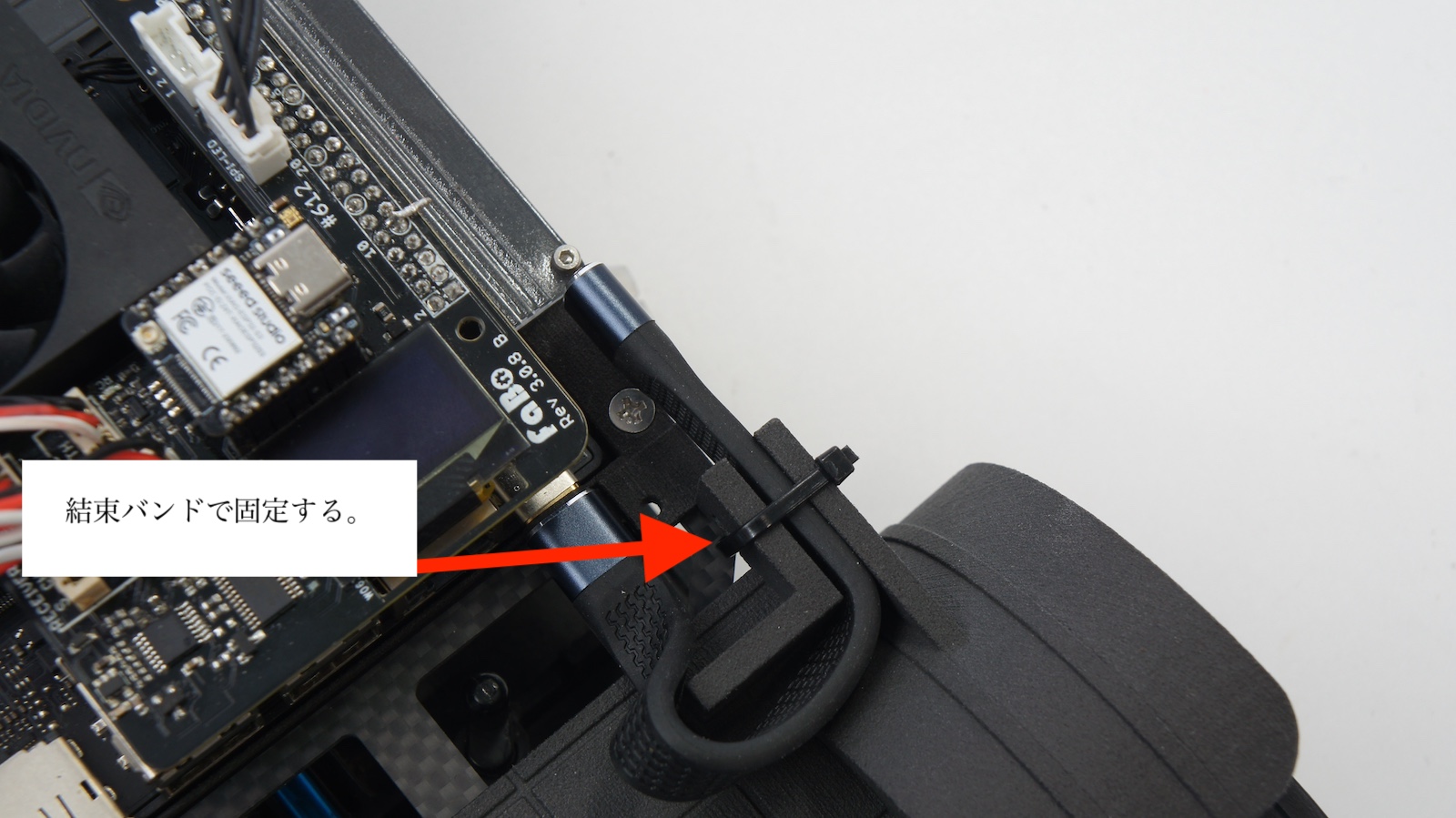
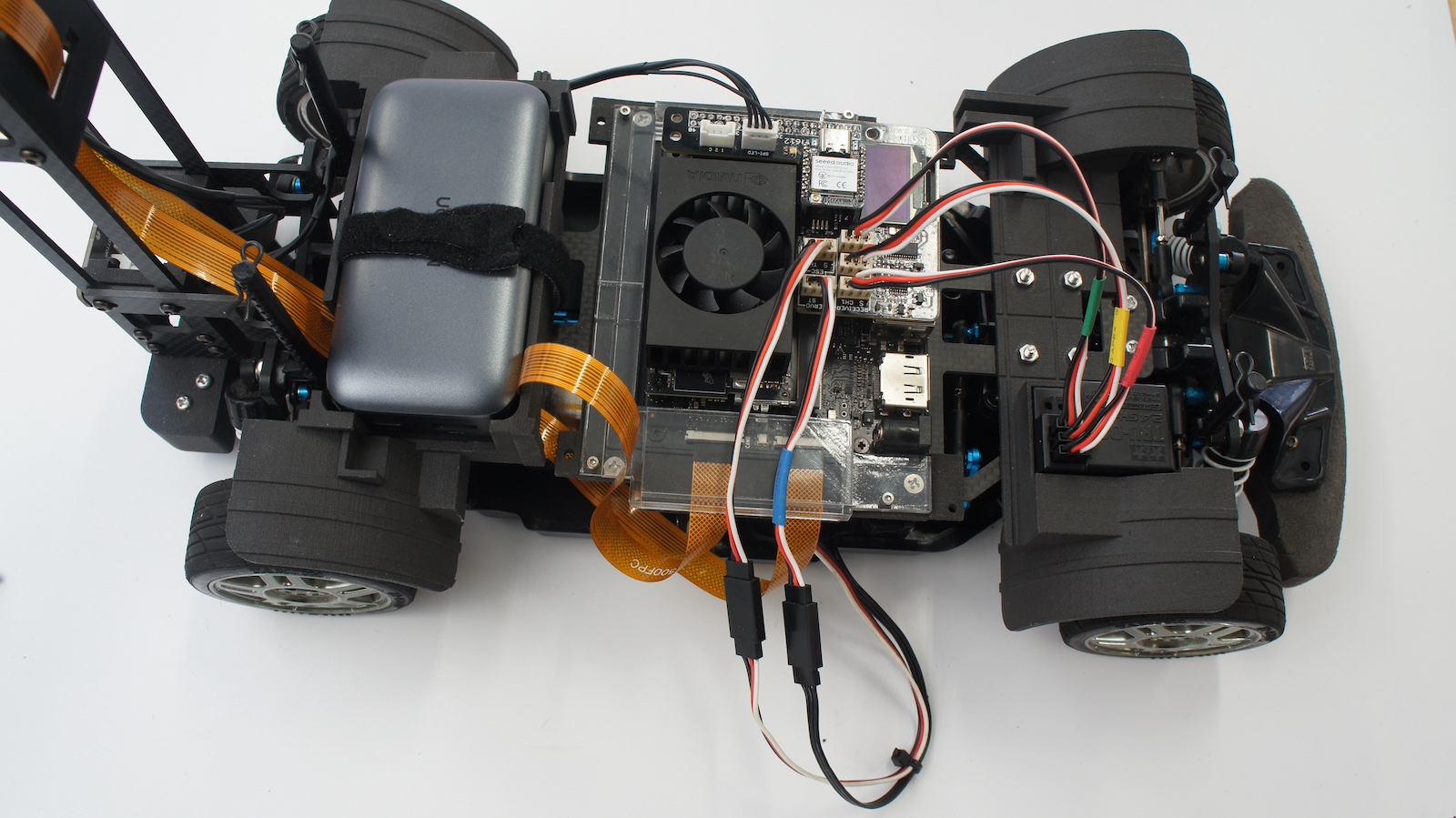
USBケーブルを結束します。
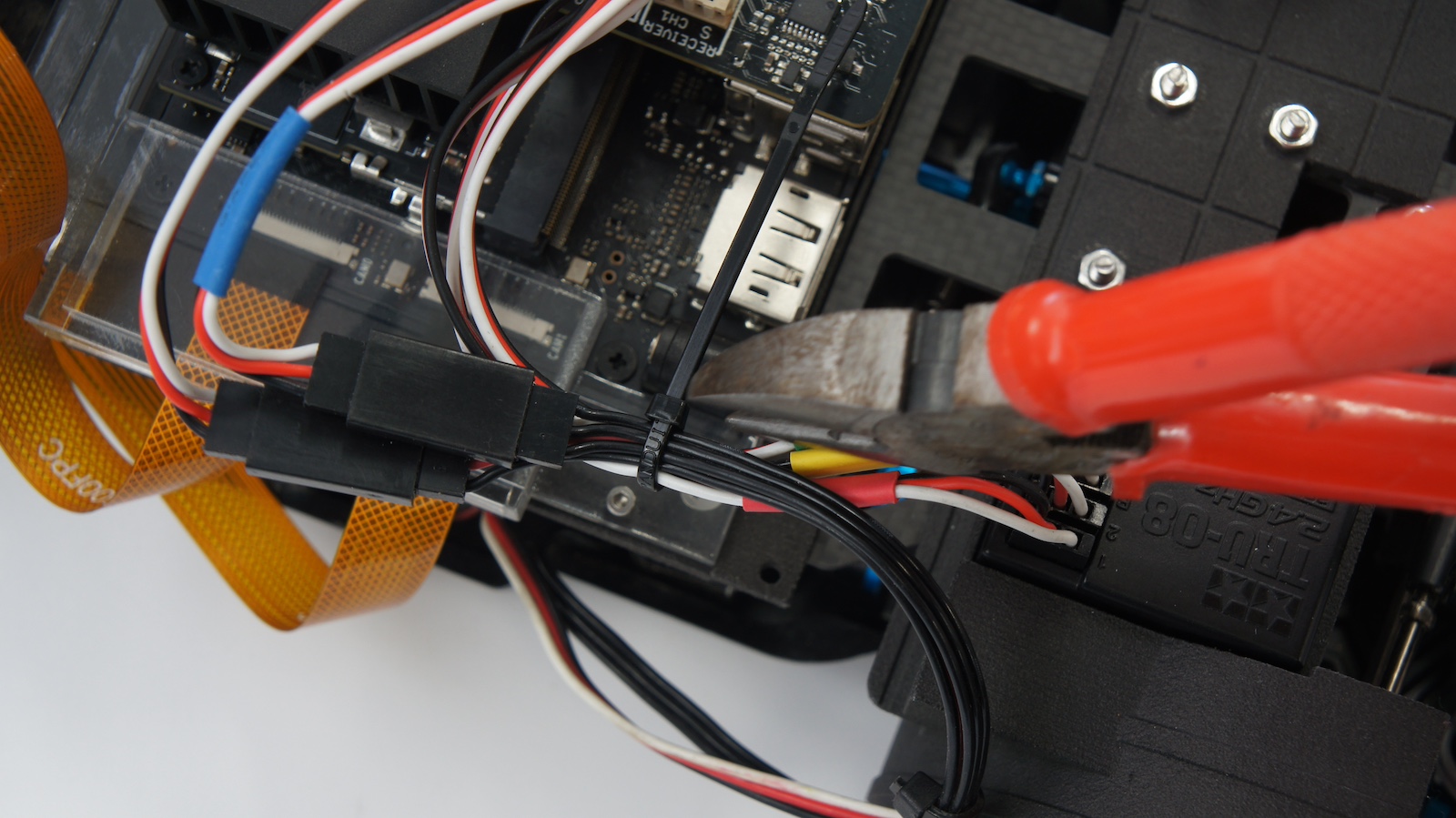
ケーブルが路面に触れないようにケーブルは結束します。
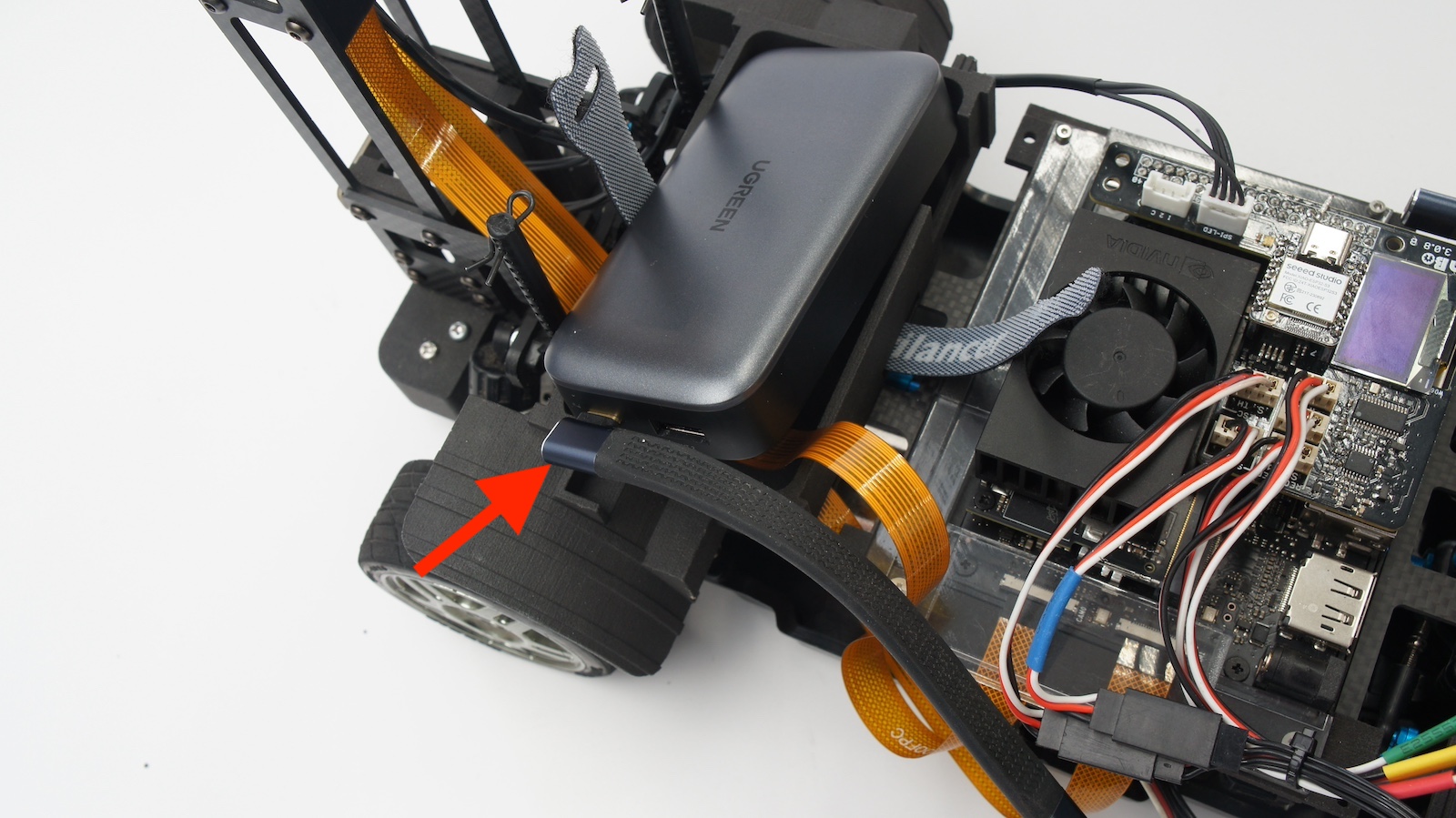
L字のUSBケーブル(Tyep-C)をバッテリーと接続します。
トリガーゲーブルを接続します。
車体の電源がOFFになっていることを確認してバッテリーを繋ぎます。
安全を確認し車体を必ず作業台に乗せてから、ONします。
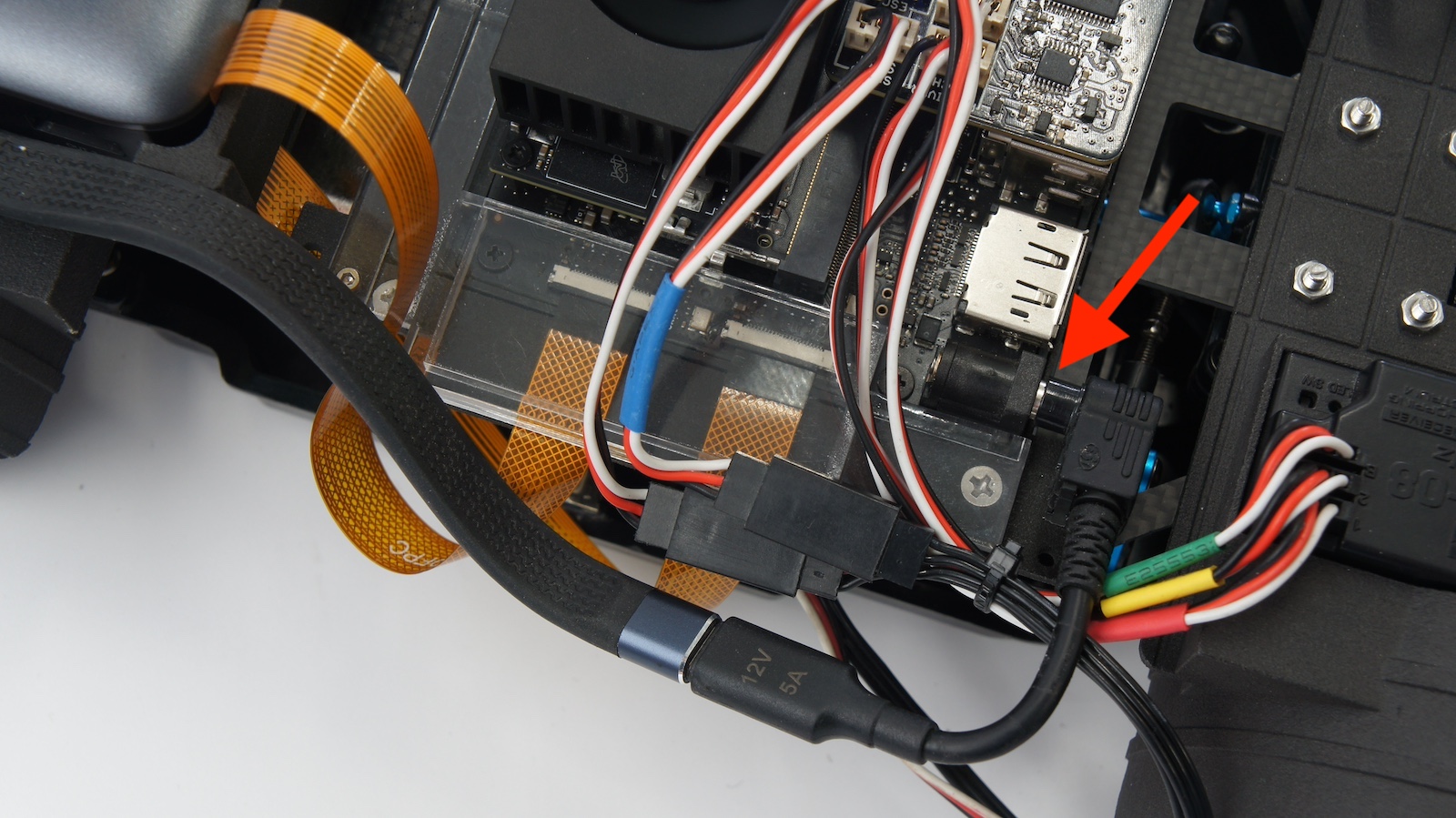
トリガーケーブルのDCプラグをJetson Orin NanoのDCジャックへ接続します。

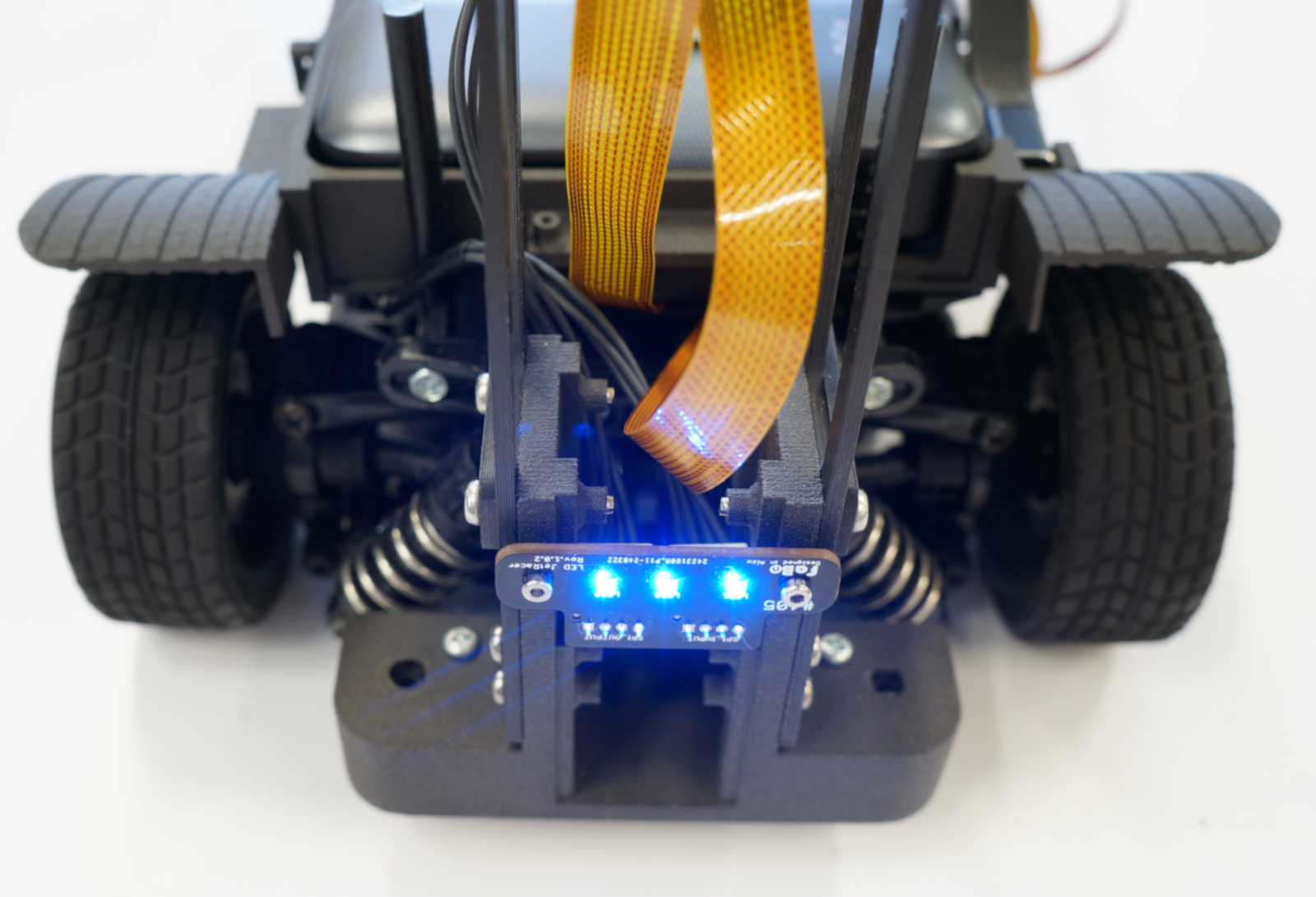
プロポ(送信機)がオフまたは、RCのスイッチがオフの時は、LEDは青色が点灯します。
後方LED
送信機は、電源ONするときはステアリング、スロットルに触らずONしてください。

必ず車体を作業台に乗せて、RCモード(手動操作)とAIモード(自動操作)の切り替えボタンがあります。送信機の裏側ボタン押すとカラーLEDが変わることを確認してください。
| カラーLEDの色 | モード |
|---|---|
| 青色 | 送信機から信号なし or 受信機から信号なし |
| 緑色 | 手動モード |
| マゼンタ色 | AIモード |

基本的な動作 プロポによる操作、信号切り替えが確認できた場合は、2つのカメラのレンズキャップを外してください。ピントがずれていた場合、お手数ですが調整願います。(別の章にて) 以上組み立ては完成です。

破損を防ぐために大事なお知らせ
内部のパーツの破損を防ぐために、必ずRCカーのボディを装着して走行してください。
ESCのキャリブレーション
ESCはメーカーによってESC起動から信号受信時に、中立をキャリブレーションする機器もございます。RCの電源を再起動する場合は、中立状態をESCに読み込ませてピーと音がなってから中立状態から変化させてください。詳しくはメーカーにお問い合わせください。(タミヤ製ESCなどTT-02 XBお使いの場合、中立は固定で調整不要です。)
最終編集日 2025-09-09