104 Angle
サンプルコードの動作
FaBo #104 LED Brickを使用してアナログ値を計測
サンプルコード使用時の接続
GPIO12にLED Brickを接続、A0にAnalog Brickを接続します。
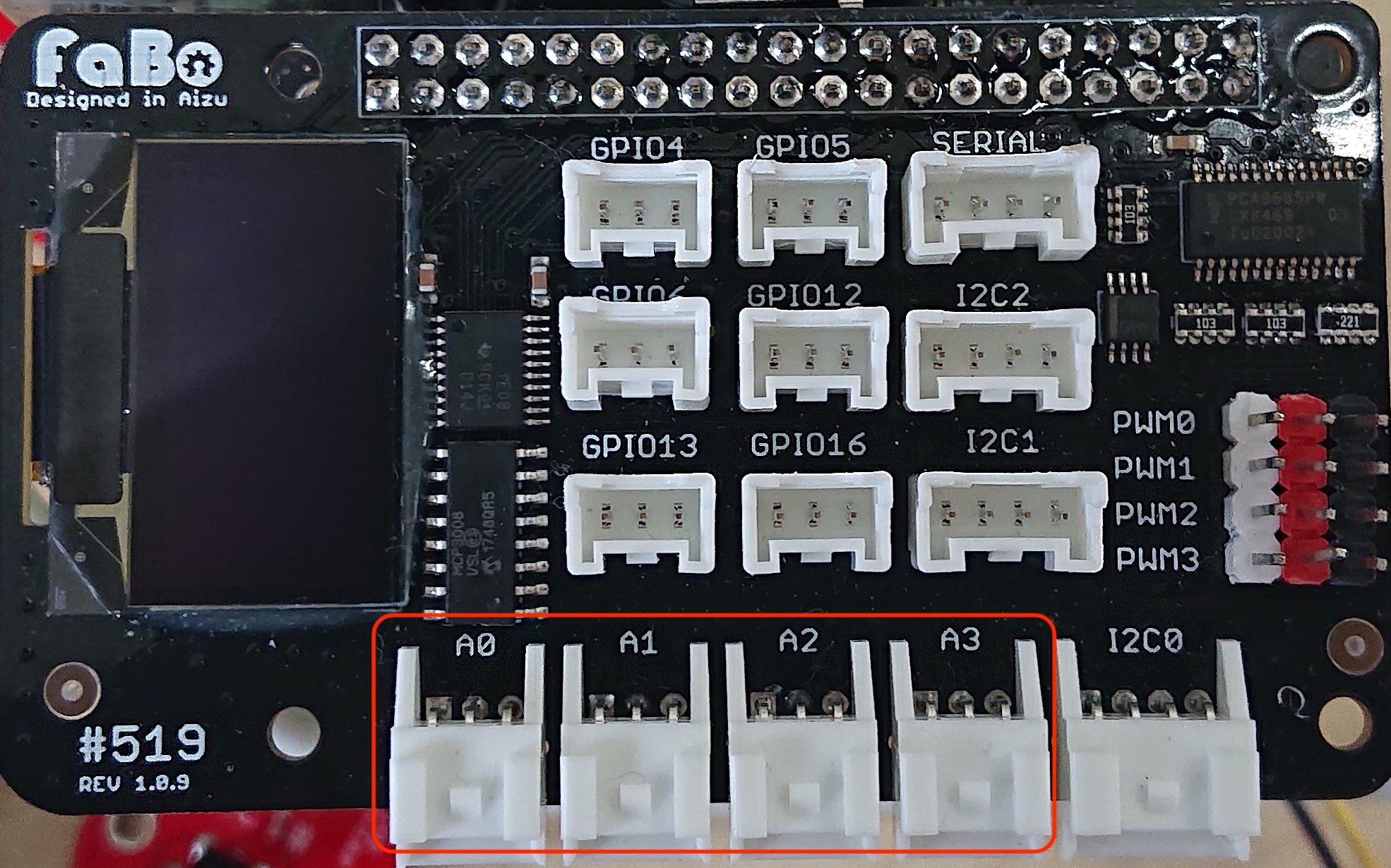
~写真〜
JETSON NANO GPIO40ピン
| ピン番号 | Jetson.GPIO番号 | NAME | ピン番号 | Jetson.GPIO番号 | NAME |
|---|---|---|---|---|---|
| 1 | - | 3.3V | 2 | - | 5V |
| 3 | 2 | I2C_2_SDA | 4 | - | 5V |
| 5 | 3 | I2C_2_SCL | 6 | - | GND |
| 7 | 4 | AUDIO_MCLK | 8 | 14 | UART_2_TX |
| 9 | - | GND | 10 | 15 | UART_2_RX |
| 11 | 17 | UART_2_RTS | 12 | 18 | I2S_4_SCLK |
| 13 | 27 | SPI_2_SCK | 14 | - | GND |
| 15 | 22 | LCD_TE | 16 | 23 | SPI_2_CS1 |
| 17 | - | 3.3V | 18 | 24 | SPI_2_CS0 |
| 19 | 10 | SPI_1_MOSI | 20 | - | GND |
| 21 | 9 | SPI_1_MISO | 22 | 25 | SPI_2_MISO |
| 23 | 11 | SPI_1_SCK | 24 | 8 | SPI_1_CS0 |
| 25 | - | GND | 26 | 7 | SPI_1_CS1 |
| 27 | - | I2C_1_SDA | 28 | - | I2C_1_SCL |
| 29 | 5 | CAM_AF_EN | 30 | - | GND |
| 31 | 6 | GPIO_OZ0 | 32 | 12 | LCD_BL_PWM |
| 33 | 13 | GPIO_PE6 | 34 | - | GND |
| 35 | 19 | I2S_4_LRCK | 36 | 16 | UART_2_CTS |
| 37 | 26 | SPI_2_MOSI | 38 | 20 | I2S_4_SDIN |
| 39 | - | GND | 40 | 21 | I2S_4_SDOUT |
準備
GPIOインターフェースをSPIとPWMをつかえるように設定しましょう。
Jetson-IO toolを起動します。
sudo /opt/nvidia/jetson-io/jetson-io.py
Pinmux テーブルの設定
Configure 40-pin expansion headerを選択します。
上下のカーソルで合わせ、スペースキーで有効にします。
GPIO12(32ピン)がPWM 1、A0は、A/Dコンバーターを使うのでSPI 1(19、21、23、24、26ピン)をそれぞれ有効にします。
Backを選択して復帰します。
pip3がインストールされていない場合は、
$sudo apt-get install python3-pip
pythonでSPIをつかうためのspidevをインストールします。
$pip3 install spidev
SPIdevの使い方。 https://pypi.org/project/spidev/
サンプルコード
サンプルは、#104 AngleをA0、#128 LED2を12に接続します。
# coding: utf-8
import Jetson.GPIO as GPIO
import spidev
import time
import sys
# A0コネクタにAngleを接続
ANGLEPIN = 0
# GPIO4コネクタにLEDを接続
LEDPIN = 12
#######################################################################
def readadc(channel):
"""
Analog Data Converterの値を読み込む
@channel チャンネル番号
"""
adc = spi.xfer2([1,(8+channel)<<4,0])
data = ((adc[1]&3) << 8) + adc[2]
return data
#######################################################################
def map(x, in_min, in_max, out_min, out_max):
"""
map関数
@x 変換したい値
@in_min 変換前の最小値
@in_max 変換前の最大値
@out_min 変換後の最小
@out_max 変換後の最大値
@return 変換された値
"""
return (x - in_min) * (out_max - out_min) // (in_max - in_min) + out_min
# GPIOポートを設定
GPIO.setmode( GPIO.BCM )
GPIO.setup( LEDPIN, GPIO.OUT )
# PWM/100Hzに設定
LED = GPIO.PWM(LEDPIN, 100)
# 初期化
LED.start(0)
spi = spidev.SpiDev()
spi.open(0,0)
spi.max_speed_hz = 5000
try:
while True:
data = readadc(ANGLEPIN)
print("\radc : {:8} ".format(data), end='')
value = map(data, 0, 1023, 0, 100)
LED.ChangeDutyCycle(value)
time.sleep( 0.01 )
except KeyboardInterrupt:
LED.stop()
GPIO.cleanup()
spi.close()
sys.exit(0)