AIとの連携
付属のUSBカメラで画像を作成し、分類の教師データを与え、Jetson Nanoに学習、その結果をLEDで表します。
USBカメラを接続しましょう。
サンプルのコピー
Terminalで下記コマンドで、classificationのサンプルをGPIO以下にコピーします。
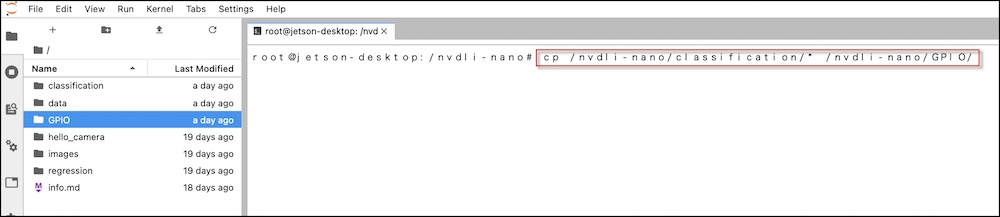
cp -r /nvdli-nano/classification/* /nvdli-nano/GPIO/
LED部分の追加
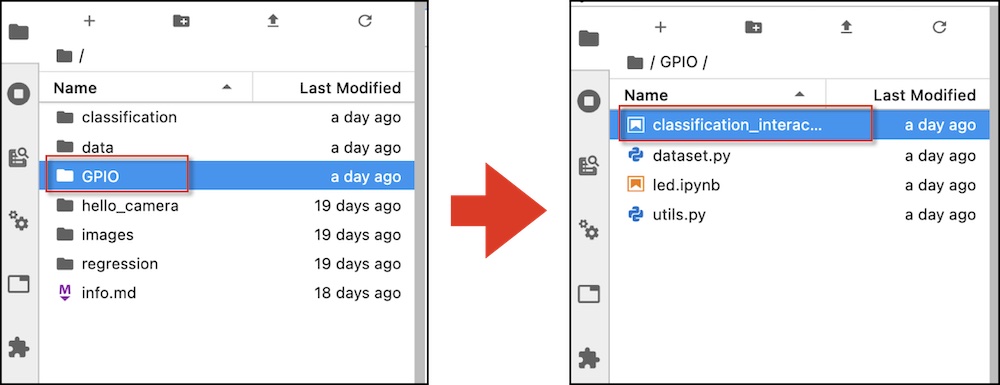
LEDとの連携は、classification_interactive.ipynbに下記部分を追加します。
追加するコードの場所を確認します。
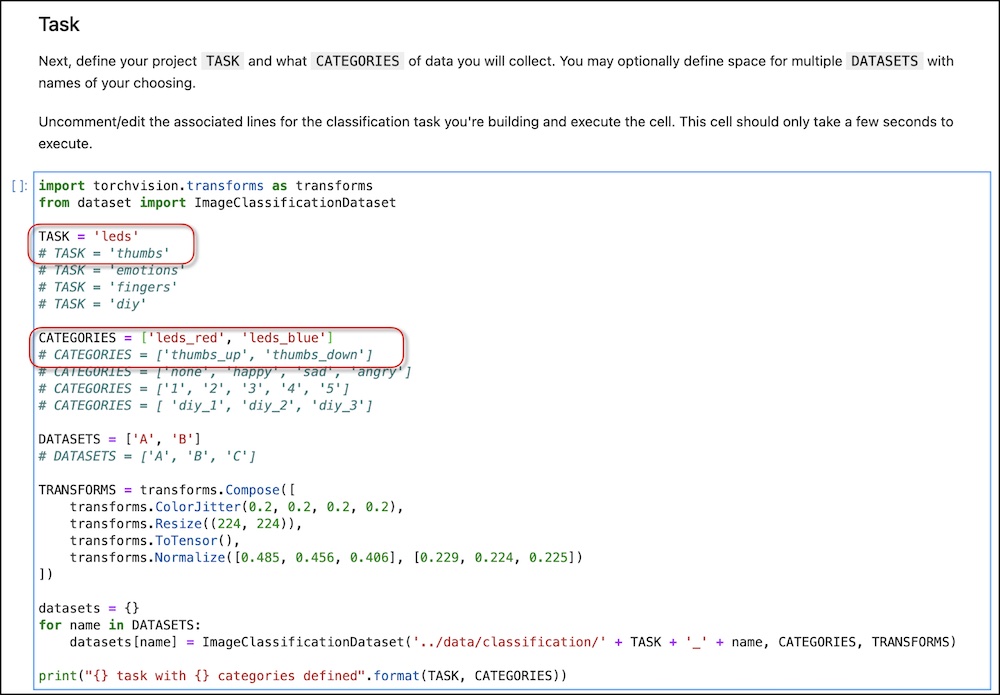
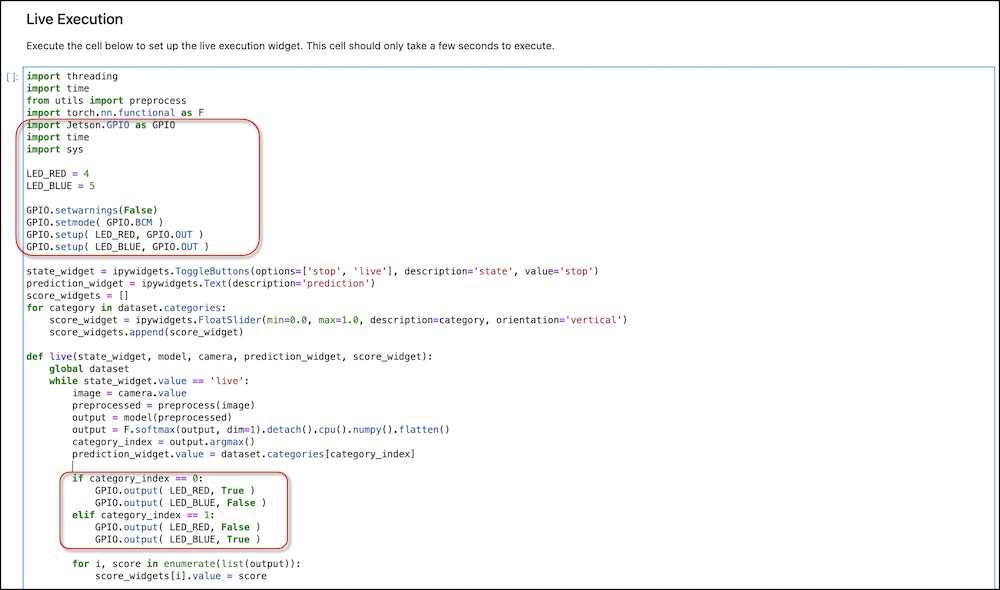
黄色い領域のコードを追加、変更します。
import torchvision.transforms as transforms
from dataset import ImageClassificationDataset
TASK = 'leds'
# TASK = 'thumbs'
# TASK = 'emotions'
# TASK = 'fingers'
# TASK = 'diy'
CATEGORIES = ['leds_red', 'leds_blue']
# CATEGORIES = ['thumbs_up', 'thumbs_down']
# CATEGORIES = ['none', 'happy', 'sad', 'angry']
# CATEGORIES = ['1', '2', '3', '4', '5']
# CATEGORIES = [ 'diy_1', 'diy_2', 'diy_3']
DATASETS = ['A', 'B']
# DATASETS = ['A', 'B', 'C']
TRANSFORMS = transforms.Compose([
transforms.ColorJitter(0.2, 0.2, 0.2, 0.2),
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
datasets = {}
for name in DATASETS:
datasets[name] = ImageClassificationDataset('../data/classification/' + TASK + '_' + name, CATEGORIES, TRANSFORMS)
print("{} task with {} categories defined".format(TASK, CATEGORIES))
追加するコードの場所を確認します。
追加するコードの場所を確認します。
import threading
import time
from utils import preprocess
import torch.nn.functional as F
import Jetson.GPIO as GPIO
import time
import sys
LED_RED = 4
LED_BLUE = 5
GPIO.setwarnings(False)
GPIO.setmode( GPIO.BCM )
GPIO.setup( LED_RED, GPIO.OUT )
GPIO.setup( LED_BLUE, GPIO.OUT )
state_widget = ipywidgets.ToggleButtons(options=['stop', 'live'], description='state', value='stop')
prediction_widget = ipywidgets.Text(description='prediction')
score_widgets = []
for category in dataset.categories:
score_widget = ipywidgets.FloatSlider(min=0.0, max=1.0, description=category, orientation='vertical')
score_widgets.append(score_widget)
def live(state_widget, model, camera, prediction_widget, score_widget):
global dataset
while state_widget.value == 'live':
image = camera.value
preprocessed = preprocess(image)
output = model(preprocessed)
output = F.softmax(output, dim=1).detach().cpu().numpy().flatten()
category_index = output.argmax()
prediction_widget.value = dataset.categories[category_index]
if category_index == 0:
GPIO.output( LED_RED, True )
GPIO.output( LED_BLUE, False )
elif category_index == 1:
GPIO.output( LED_RED, False )
GPIO.output( LED_BLUE, True )
for i, score in enumerate(list(output)):
score_widgets[i].value = score
def start_live(change):
if change['new'] == 'live':
execute_thread = threading.Thread(target=live, args=(state_widget, model, camera, prediction_widget, score_widget))
execute_thread.start()
state_widget.observe(start_live, names='value')
live_execution_widget = ipywidgets.VBox([
ipywidgets.HBox(score_widgets),
prediction_widget,
state_widget
])
# display(live_execution_widget)
print("live_execution_widget created")
led_red,led_blueをカテゴリーで選択し、Addボタンを押して、カメラ画像データセット収集後
学習(train)ボタンをクリックし、モデルができたならば保存しましょう。
動作が確認できたなら、つぎのページでDockerでの保存しましょう。