ServoとAIの連携(回帰)
サンプルのコピー
Terminalで下記コマンドで、regressionのサンプルをpwmフォルダ以下にコピーします。
cp -r /nvdli-nano/regression/* /nvdli-nano/pwm/
ソースの修正
以下の黄色い領域のコードを追加します。
import torchvision.transforms as transforms
from dataset import XYDataset
TASK = 'servo'
# TASK = 'face'
# TASK = 'diy'
CATEGORIES = ['finger', 'left_eye', 'right_eye']
# CATEGORIES = ['nose', 'left_eye', 'right_eye']
# CATEGORIES = [ 'diy_1', 'diy_2', 'diy_3']
DATASETS = ['A', 'B']
# DATASETS = ['A', 'B', 'C']
TRANSFORMS = transforms.Compose([
transforms.ColorJitter(0.2, 0.2, 0.2, 0.2),
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
datasets = {}
for name in DATASETS:
datasets[name] = XYDataset('../data/regression/' + TASK + '_' + name, CATEGORIES, TRANSFORMS)
print("{} task with {} categories defined".format(TASK, CATEGORIES))
追加するコードの場所を確認します。
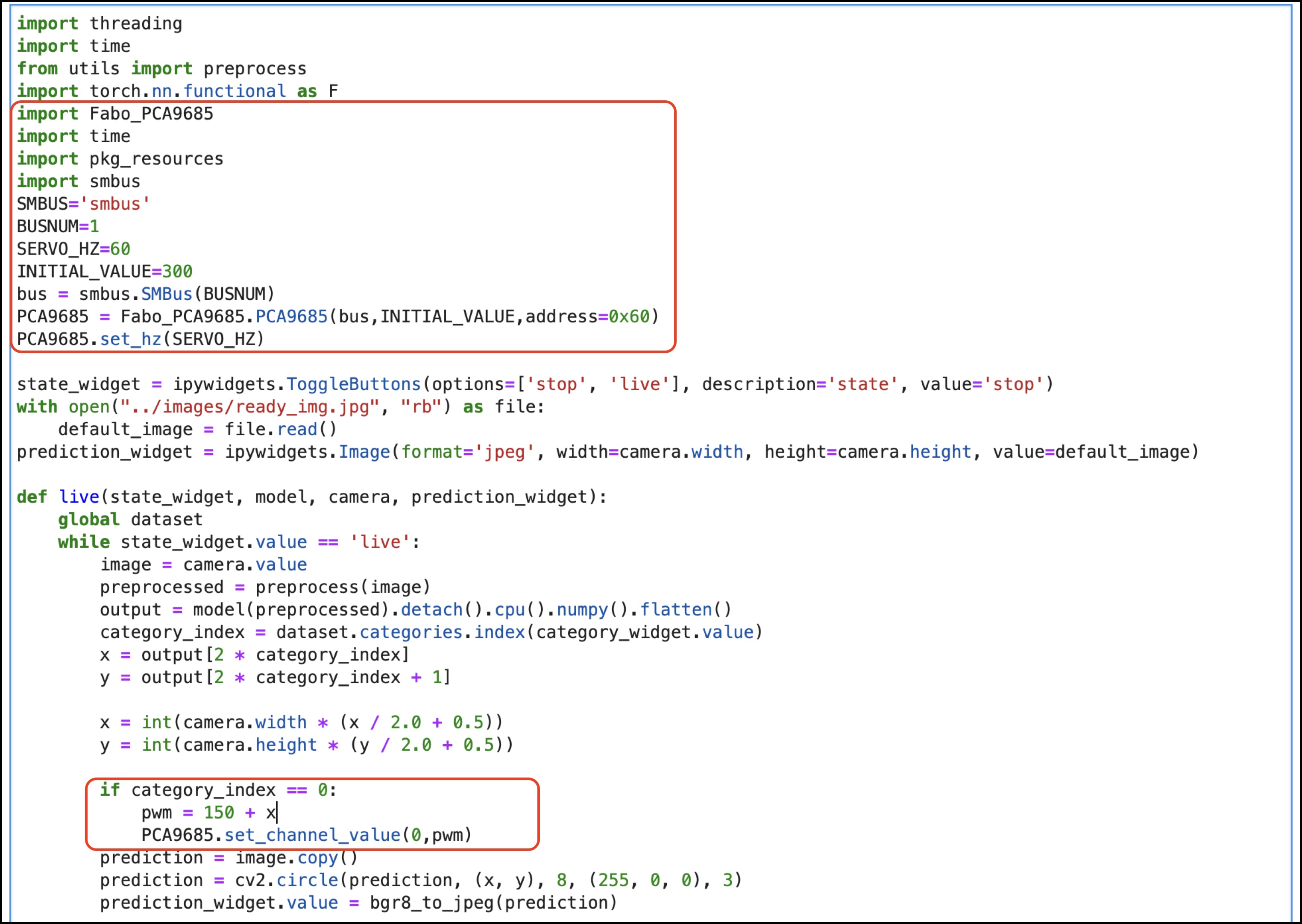
以下の黄色い領域のコードを追加します。
import threading
import time
from utils import preprocess
import torch.nn.functional as F
import Fabo_PCA9685
import time
import pkg_resources
import smbus
SMBUS='smbus'
BUSNUM=1
SERVO_HZ=60
INITIAL_VALUE=300
bus = smbus.SMBus(BUSNUM)
PCA9685 = Fabo_PCA9685.PCA9685(bus,INITIAL_VALUE,address=0x40)
PCA9685.set_hz(SERVO_HZ)
state_widget = ipywidgets.ToggleButtons(options=['stop', 'live'], description='state', value='stop')
with open("../images/ready_img.jpg", "rb") as file:
default_image = file.read()
prediction_widget = ipywidgets.Image(format='jpeg', width=camera.width, height=camera.height, value=default_image)
def live(state_widget, model, camera, prediction_widget):
global dataset
while state_widget.value == 'live':
image = camera.value
preprocessed = preprocess(image)
output = model(preprocessed).detach().cpu().numpy().flatten()
category_index = dataset.categories.index(category_widget.value)
x = output[2 * category_index]
y = output[2 * category_index + 1]
x = int(camera.width * (x / 2.0 + 0.5))
y = int(camera.height * (y / 2.0 + 0.5))
if category_index == 0:
pwm = 150 + x
PCA9685.set_channel_value(0,pwm)
prediction = image.copy()
prediction = cv2.circle(prediction, (x, y), 8, (255, 0, 0), 3)
prediction_widget.value = bgr8_to_jpeg(prediction)
def start_live(change):
if change['new'] == 'live':
execute_thread = threading.Thread(target=live, args=(state_widget, model, camera, prediction_widget))
execute_thread.start()
state_widget.observe(start_live, names='value')
live_execution_widget = ipywidgets.VBox([
prediction_widget,
state_widget
])
# display(live_execution_widget)
print("live_execution_widget created")