[Topics]タブ
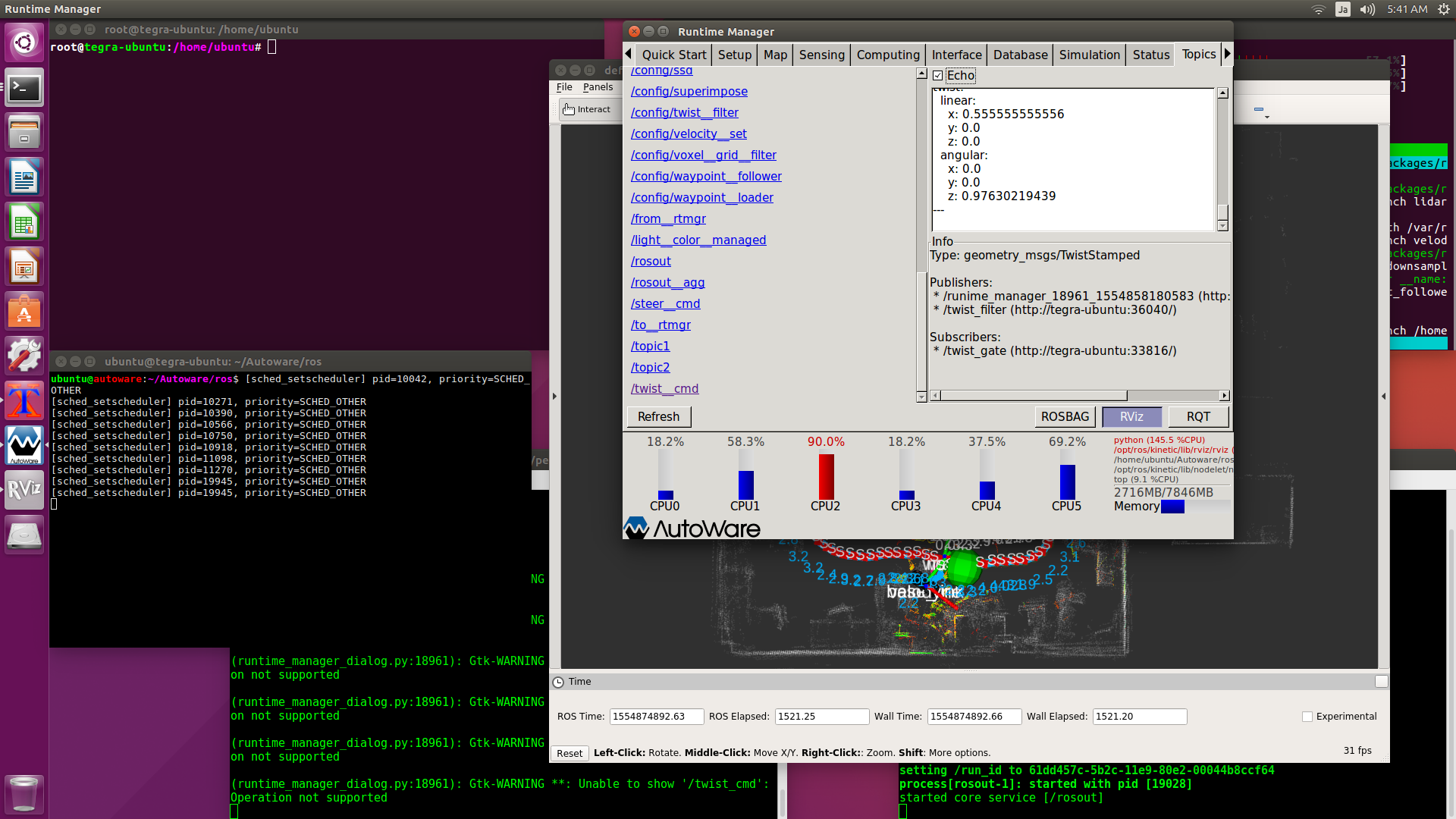
【twist_cmd】
車両制御命令のROSトピックです。
[/twist_cmd]トピックが目標値を持つトピックになります。
twist_cmd.twist.linear.xが目標速度(m/s)です。
twist_cmd.twist.angular.zが目標角速度(rad/s)です。
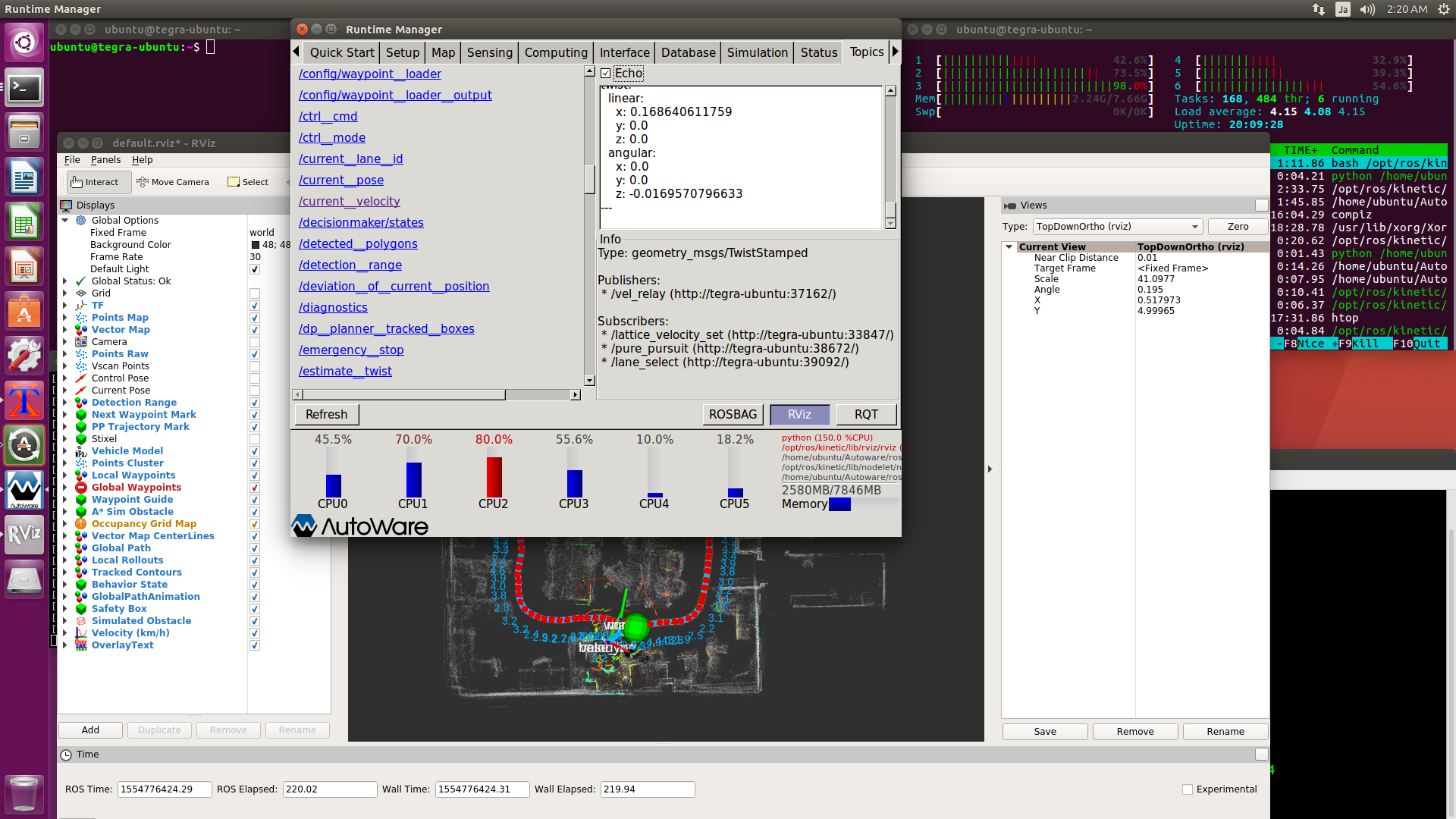
[Refresh]ボタンをクリックすると、現在値を持つ[/current_velocity]トピックが表示されます。
current_velocity.twist.linear.xが現在速度(m/s)です。
current_velocity.twist.angular.zが現在角速度(rad/s)です。
この値が取得できる状態なら、車両が走行可能になります。
xtermのコマンドラインでも確認できます。
1 | rostopic echo /twist_cmd |