VLP-16のデータをROS RVizで確認
【Autowareコンテナを起動】
AutowareコンテナにはROS一式をインストールしてあるので、ROSをそのまま使うことができます。
1 | docker start CONTAINER_ID |
setfacl.shを実行してハードウェアパーミッションの変更を行います。
1 2 3 | sudo su /home/ubuntu/scripts/setfacl.sh exit |
【VLP-16のデータをROS RVizで確認】
roscoreを起動
1 | roscore& |
VLP-16のROSノードを起動
1 | roslaunch velodyne_pointcloud VLP16_points.launch & |
コマンドラインでの確認
1 2 3 | rosnode list rostopic list rostopic echo /velodyne_points |
RVizでの確認
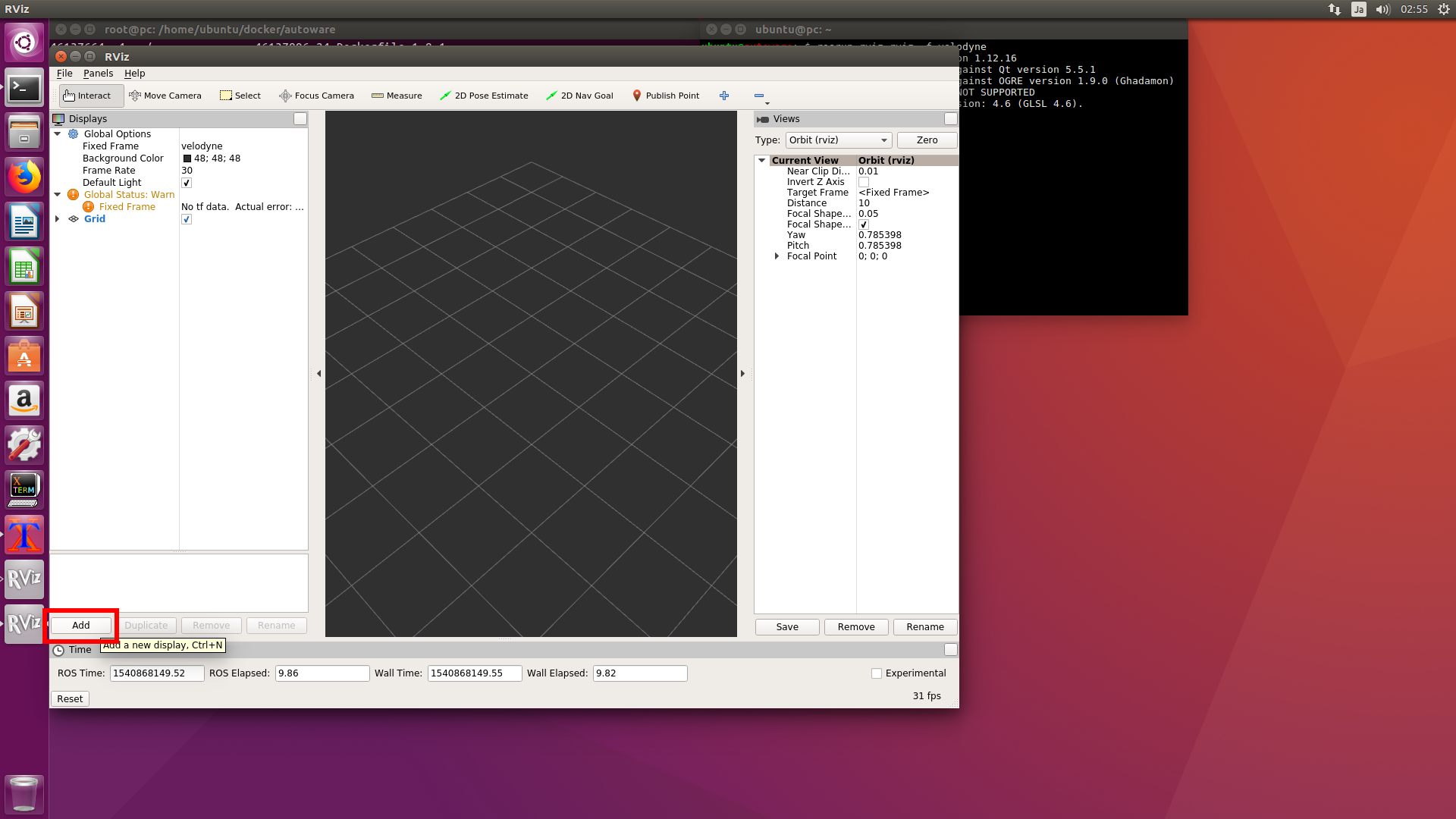
1 | rosrun rviz rviz -f velodyne |
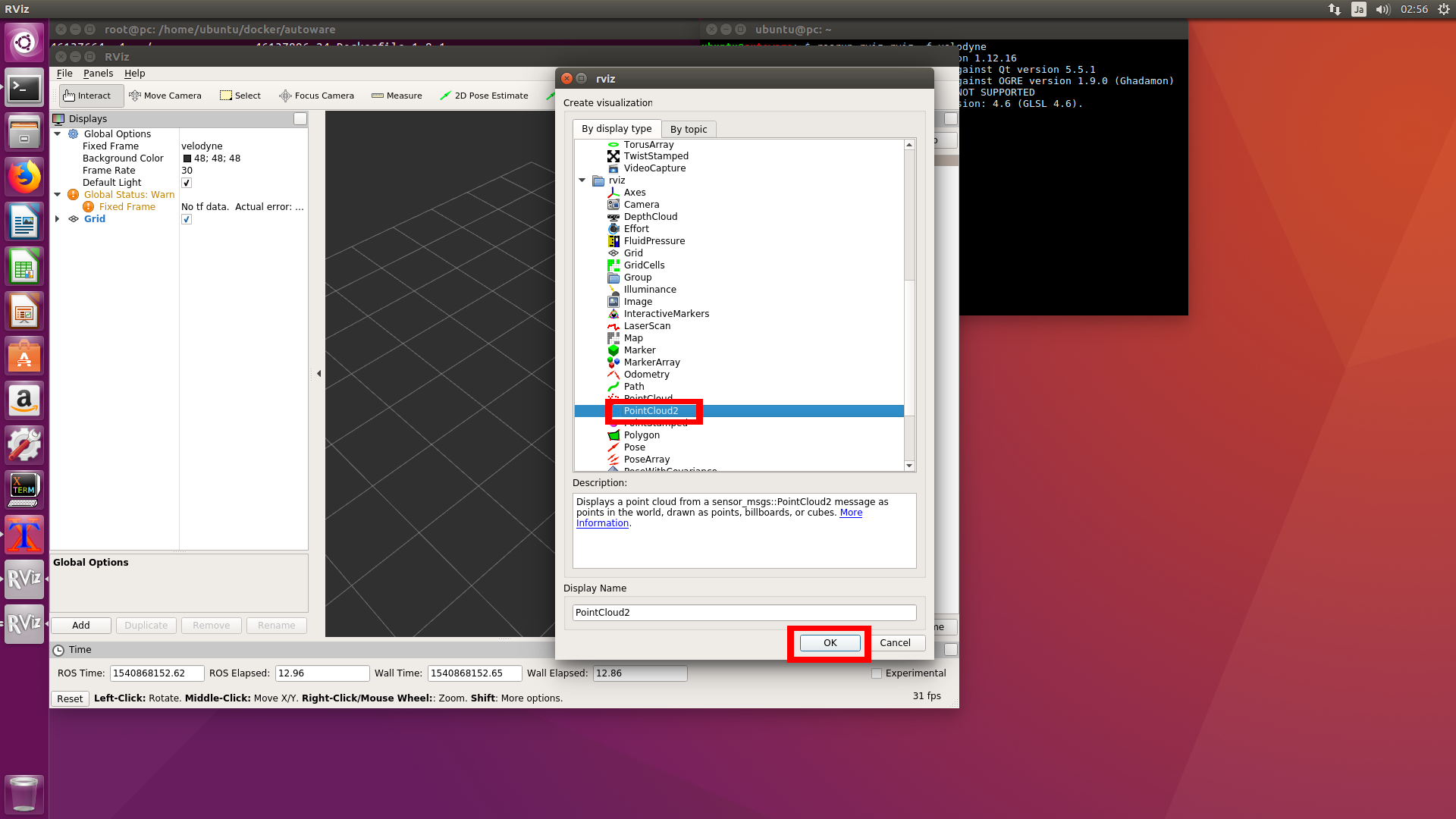
rviz画面左下の方にあるAddボタンを押して、PointCloud2の項目を追加します。
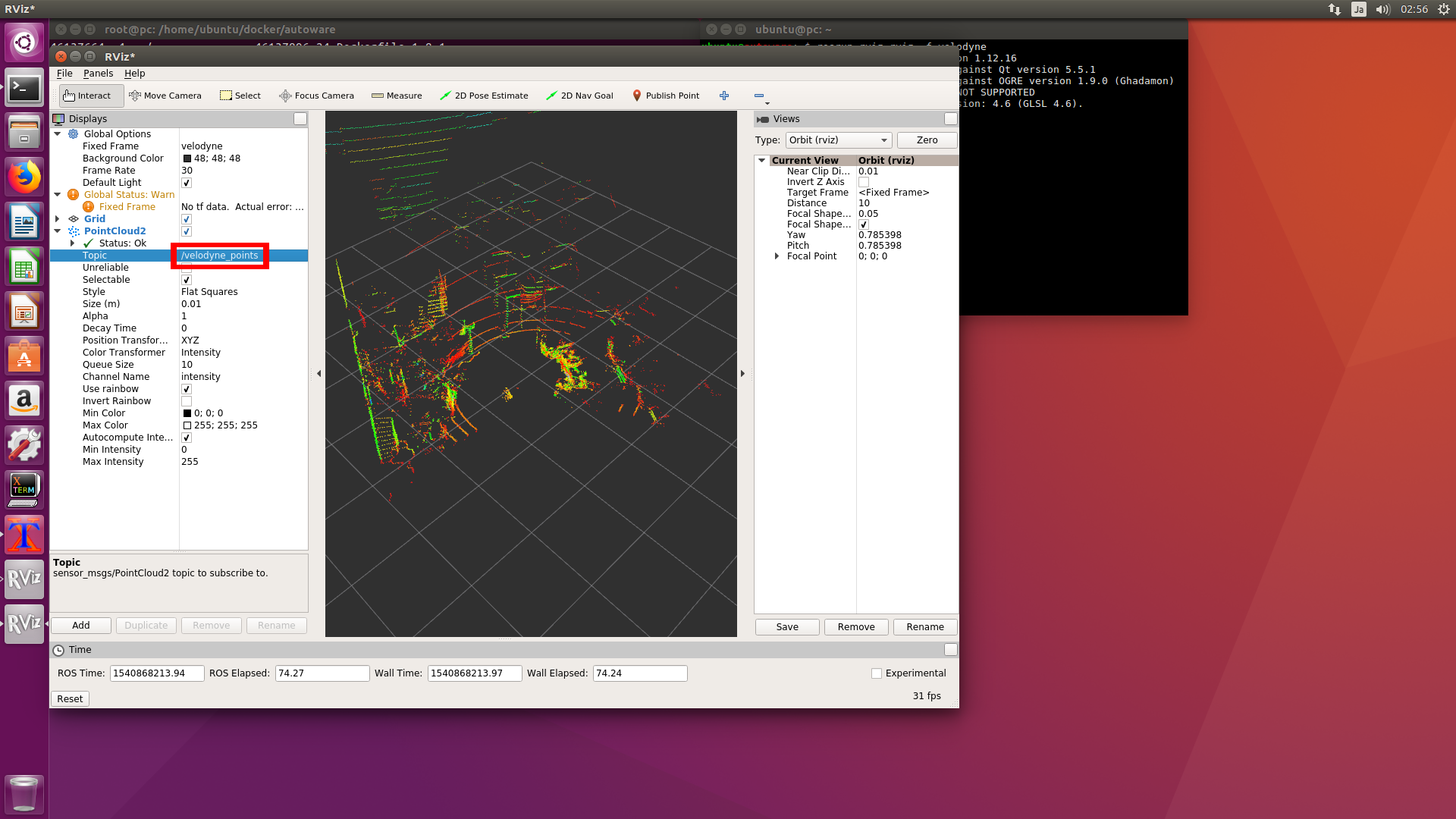
PointCloud2項目のTopic項目に/velodyne_pointsを入力してrviz画面にVLP-16の値を表示します。
左:rosrun、右:AutowareのRViz
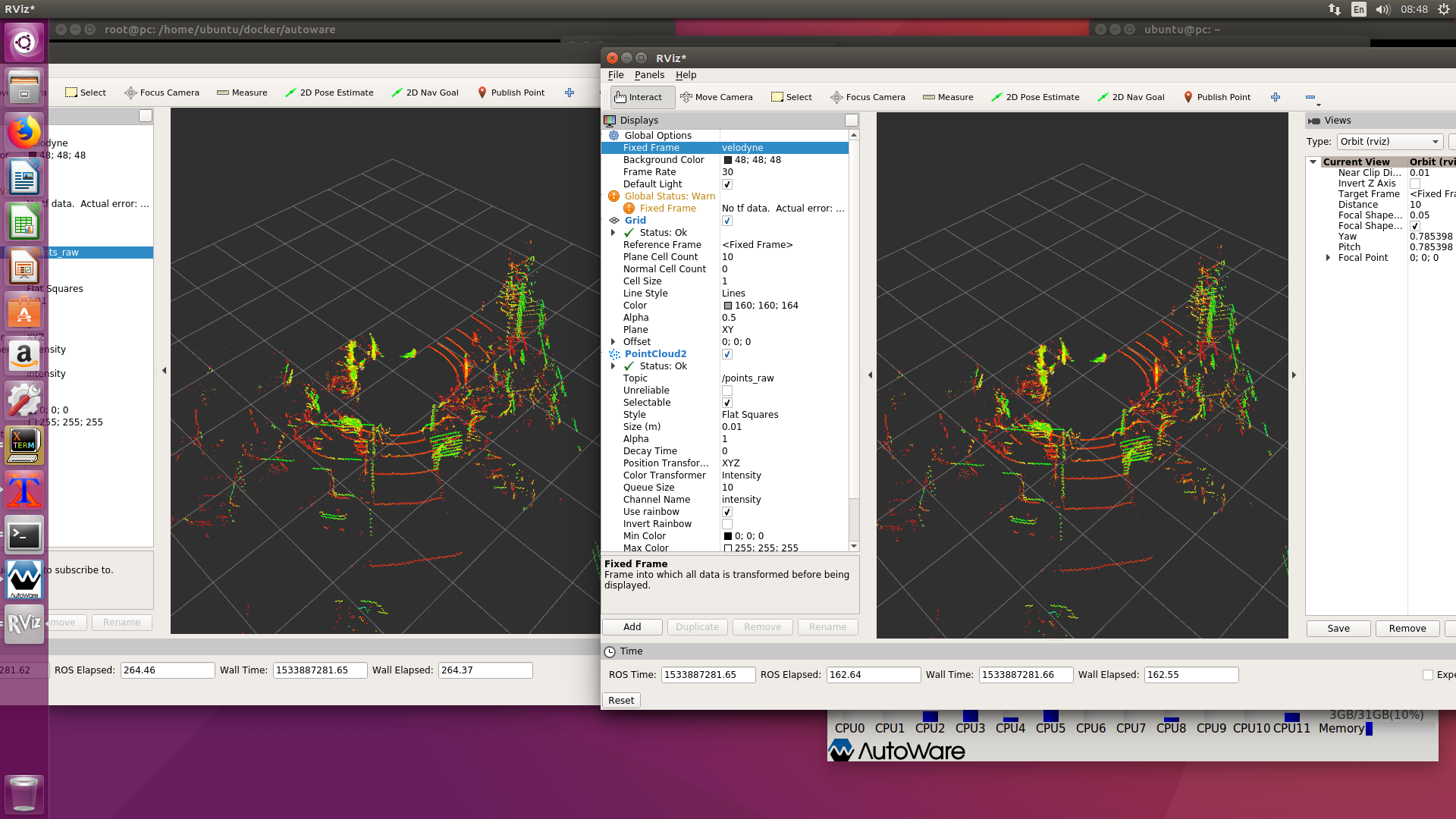 Autowareではトピック名の変換が行われていますが、rawデータは同じものとなります。
Autowareではトピック名の変換が行われていますが、rawデータは同じものとなります。