[Sensing]タブ
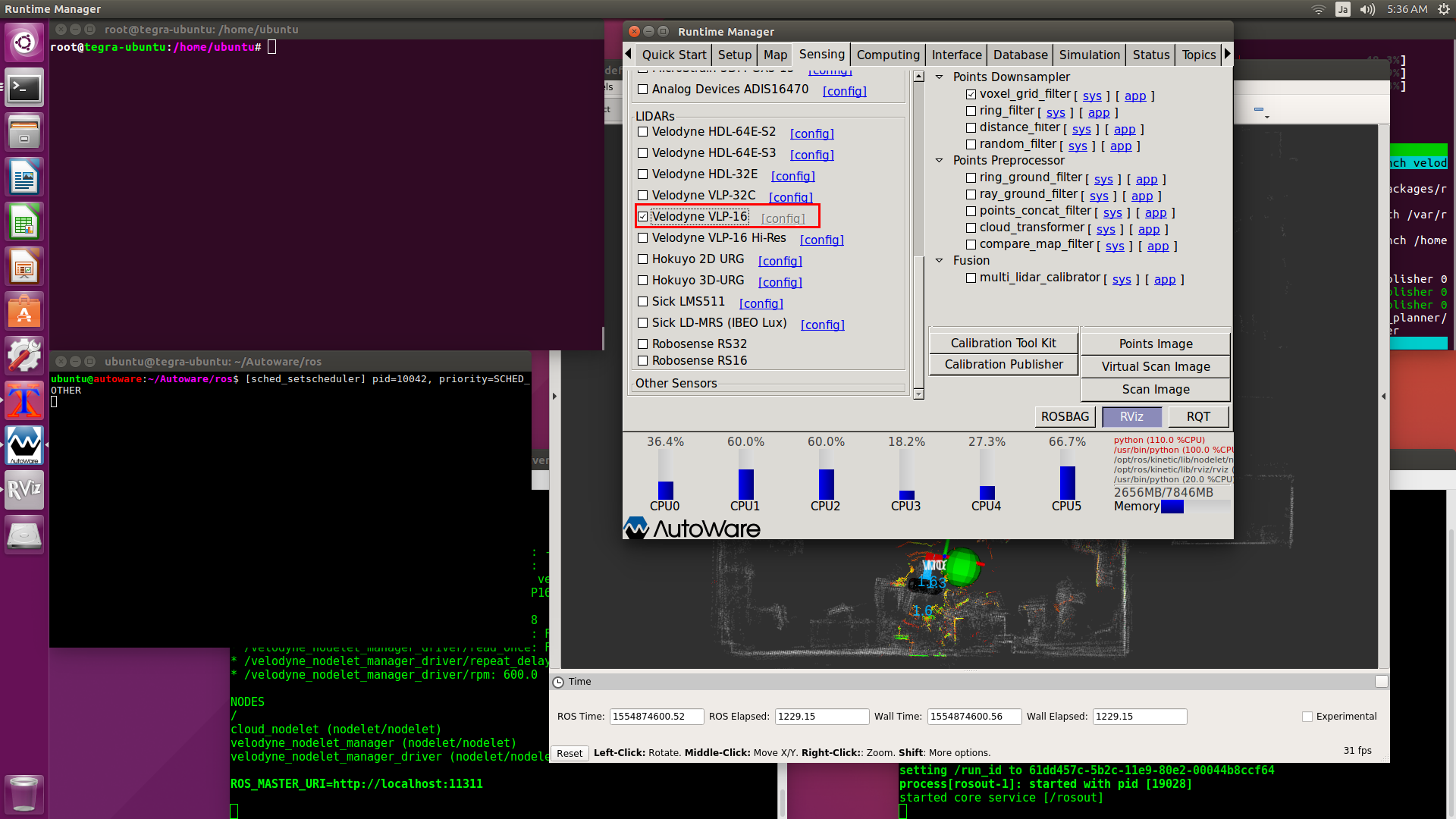
【Velodyne VLP-16】
[config]でVLP-16のキャリブレーションファイルを指定して、VLP-16を有効にします。
~/Autoware/ros/src/sensing/drivers/lidar/packages/velodyne/velodyne_pointcloud/params/VLP16db.yaml
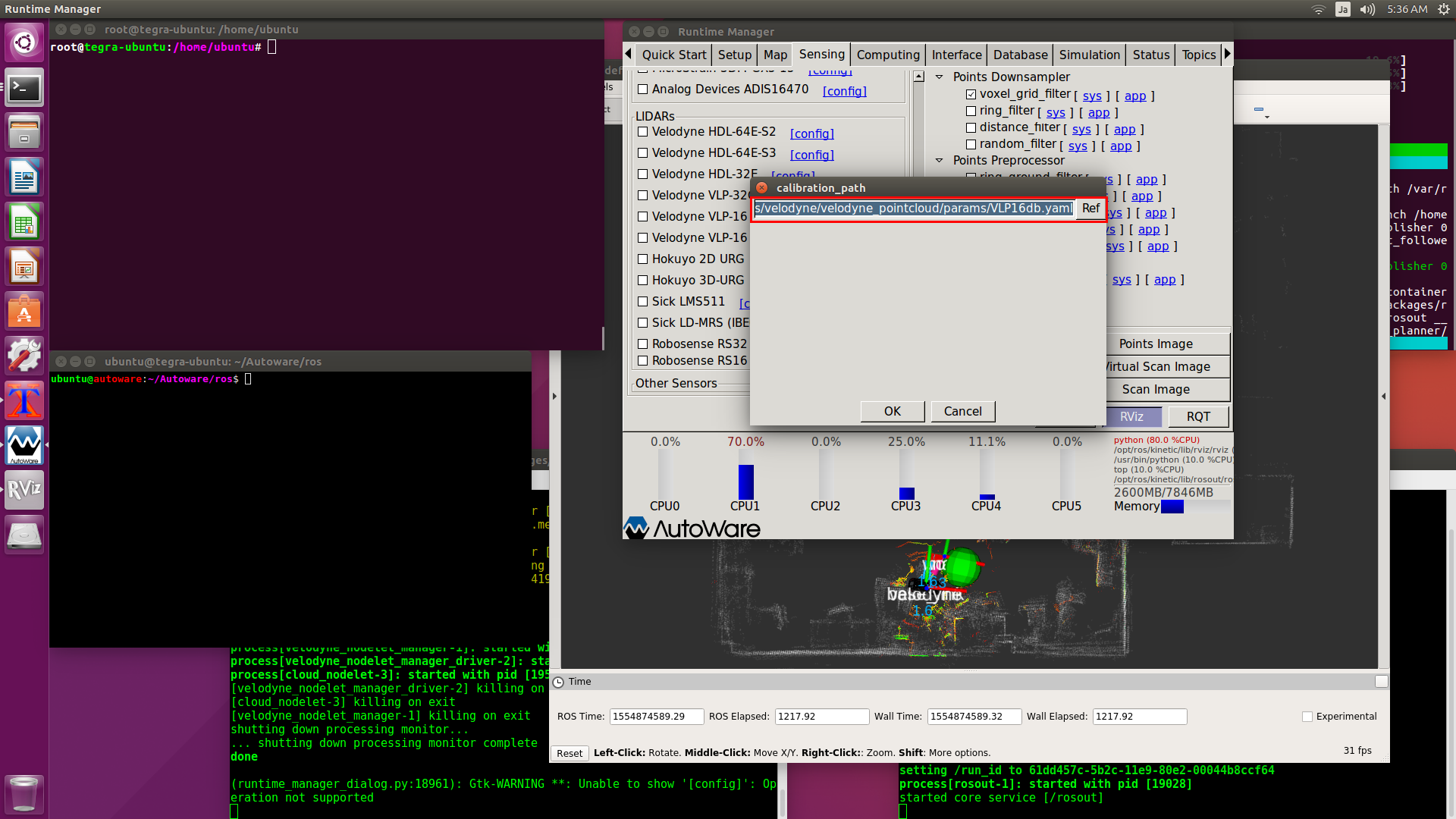
VLP16_hires_db.yamlはVLP-16のハイレゾリューション版用のキャリブレーションで、これはセンサー自体が別物になります。
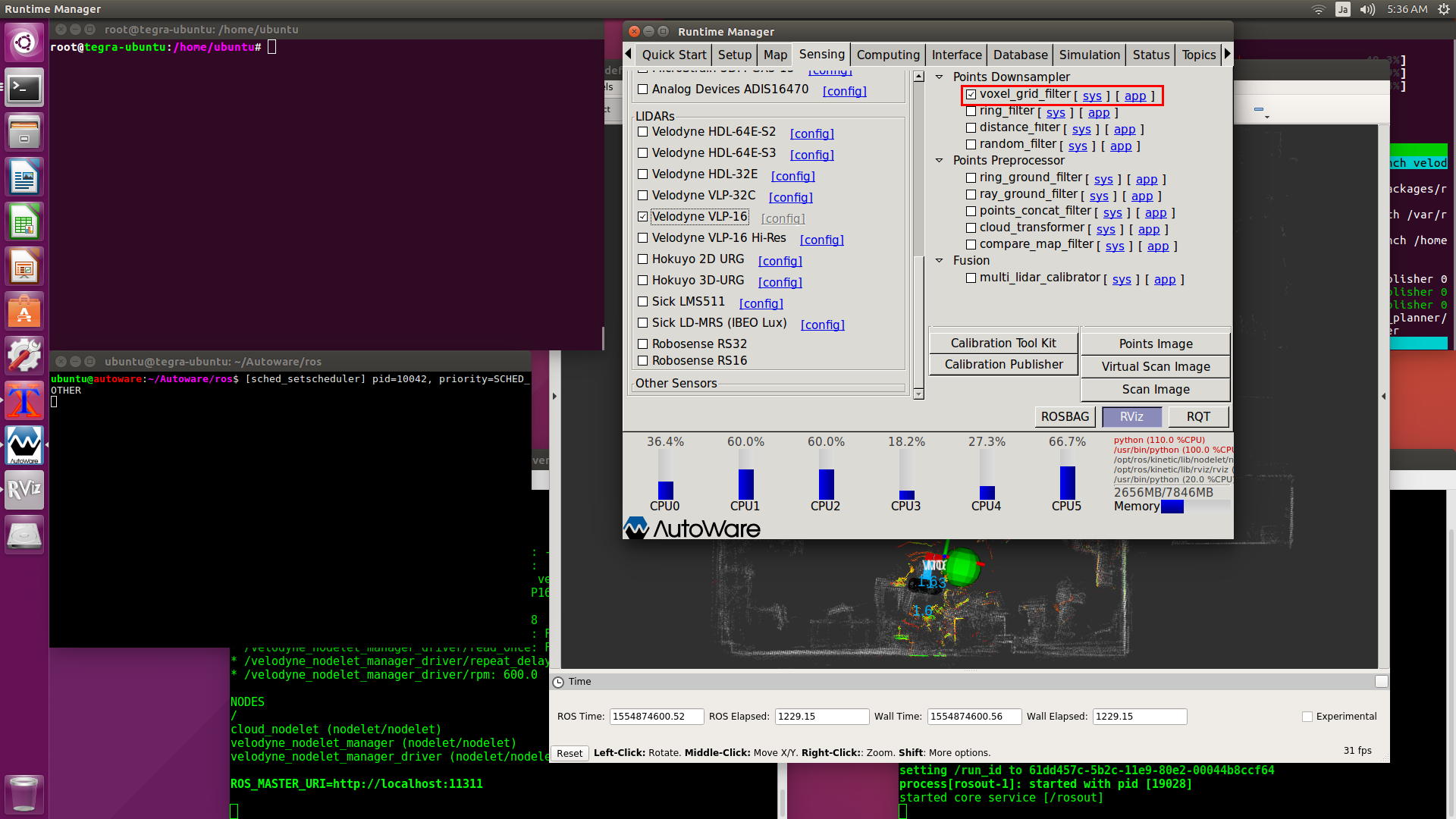
【voxel_grid_filter】
VLP-16は毎秒30万箇所の距離を計測します。
このポイント数を削減して処理速度を向上させます。
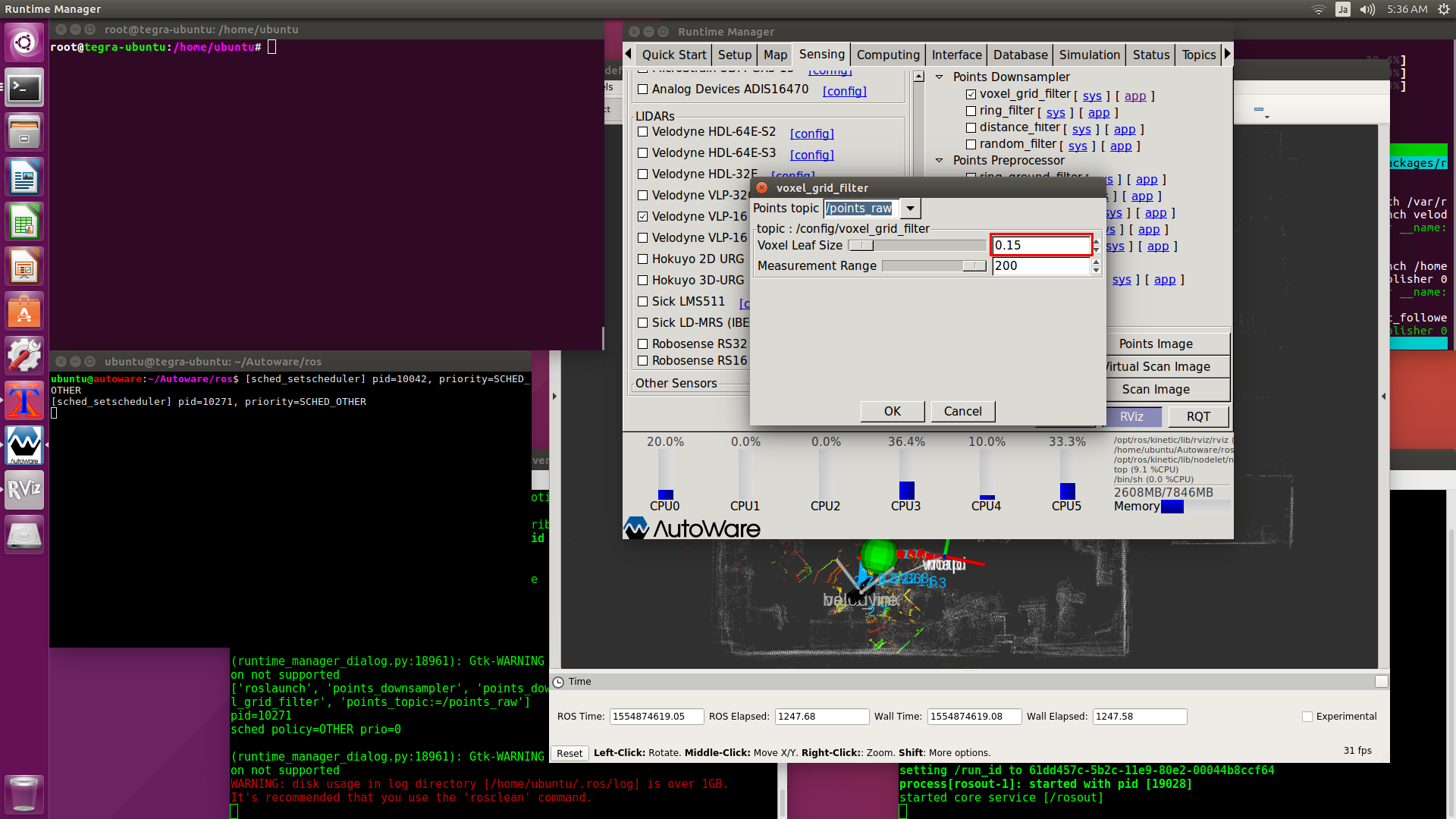
[voxel_grid_filter]の[app]をクリックして、[Voxel Leaf Size]を0.15(m)に変更します。
この値は小さいほど精度があがりますが、屋外のような広い空間では調整が必要になるかもしれません。