3Dマップを作成する
【画像】
【BLAMをインストール】
3Dマップ作成用のPCにBLAMをインストールします。
BLAMのインストール方法はgithubに従ってください。
https://github.com/naisy/blam
簡単に説明すると、
* apt-get install libtbb-dev libboost-all-dev cmake cpio python-wstool
* ROS Kinetic
* Intel MKL
* GTSAM
を先にインストールしてから、blamの
1 | ./build.sh |
を実行します。
BLAMのビルド中に何度かエラーが表示されますが、そのまま処理が継続するので完了するまで待ちます。
このBLAMのフォークはオフライン処理に特化しています。また、Autowareをラジコンで使うマップに最適化してあります。
【3Dマップを作成】
BLAMを使って3Dマップを作成します。
BLAMの実行方法はgithubに従ってください。
簡単に説明すると、
* TX2に保存したROSBAGファイル(vlp-16.bag)をscpでPCに転送
を行ってから、blamの
1 | ./blam_offline.sh vlp-16.bag |
を実行します。
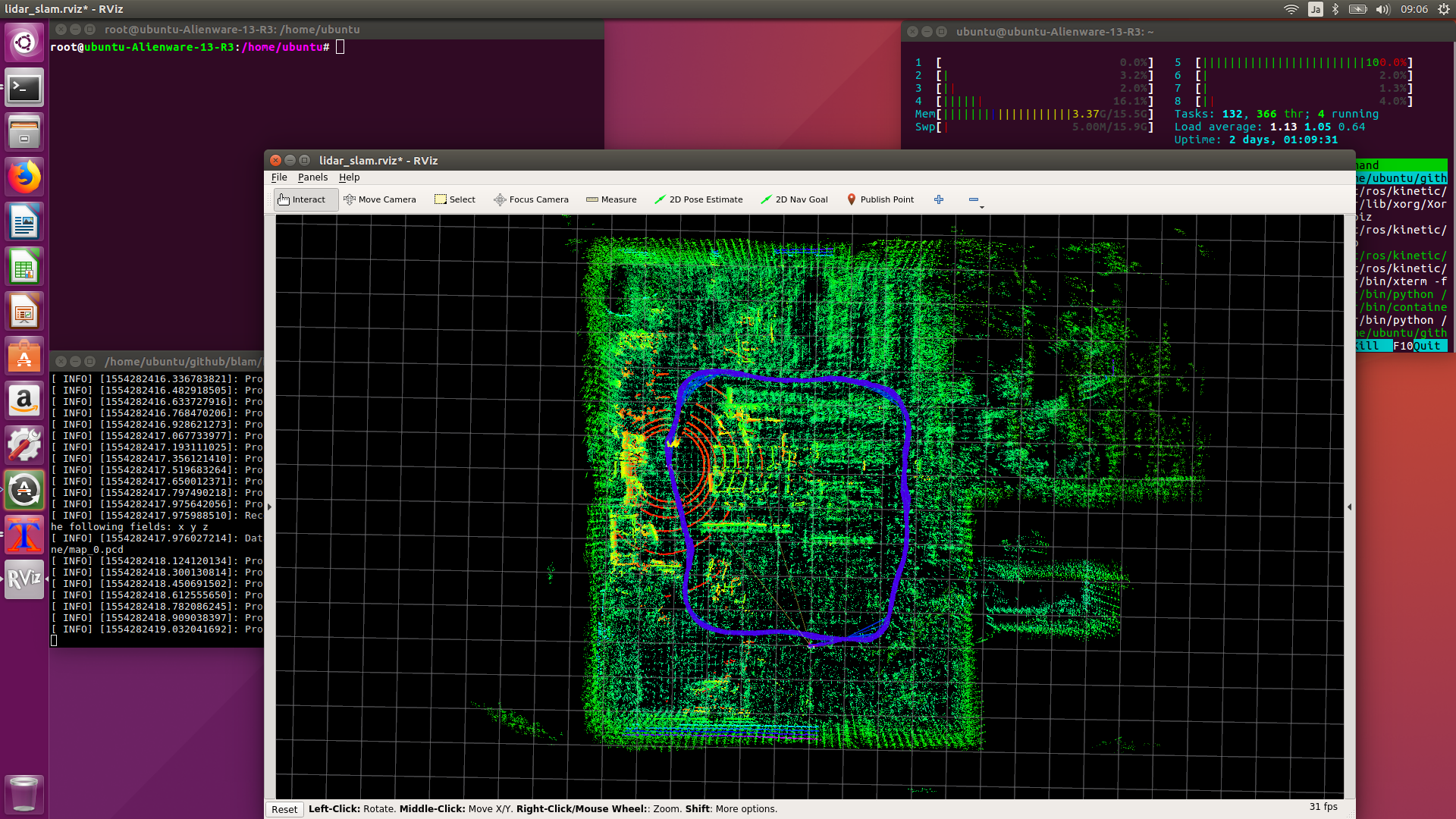
実行中は、blamの
1 | ./blam_rviz.sh |
を実行すると、rvizで3Dマップの作成状況を確認できます。
完成した3Dマップは./pcd_offline/map_0.pcdになります。