VLP-16 ネットワーク設定
【目標】
ROSでVelodyne VLP-16が利用できることを確認する。
【必要なもの】
- Velodyne VLP-16
- Autoware用のTX2、もしくはROS KineticをインストールしたPC
【画像】

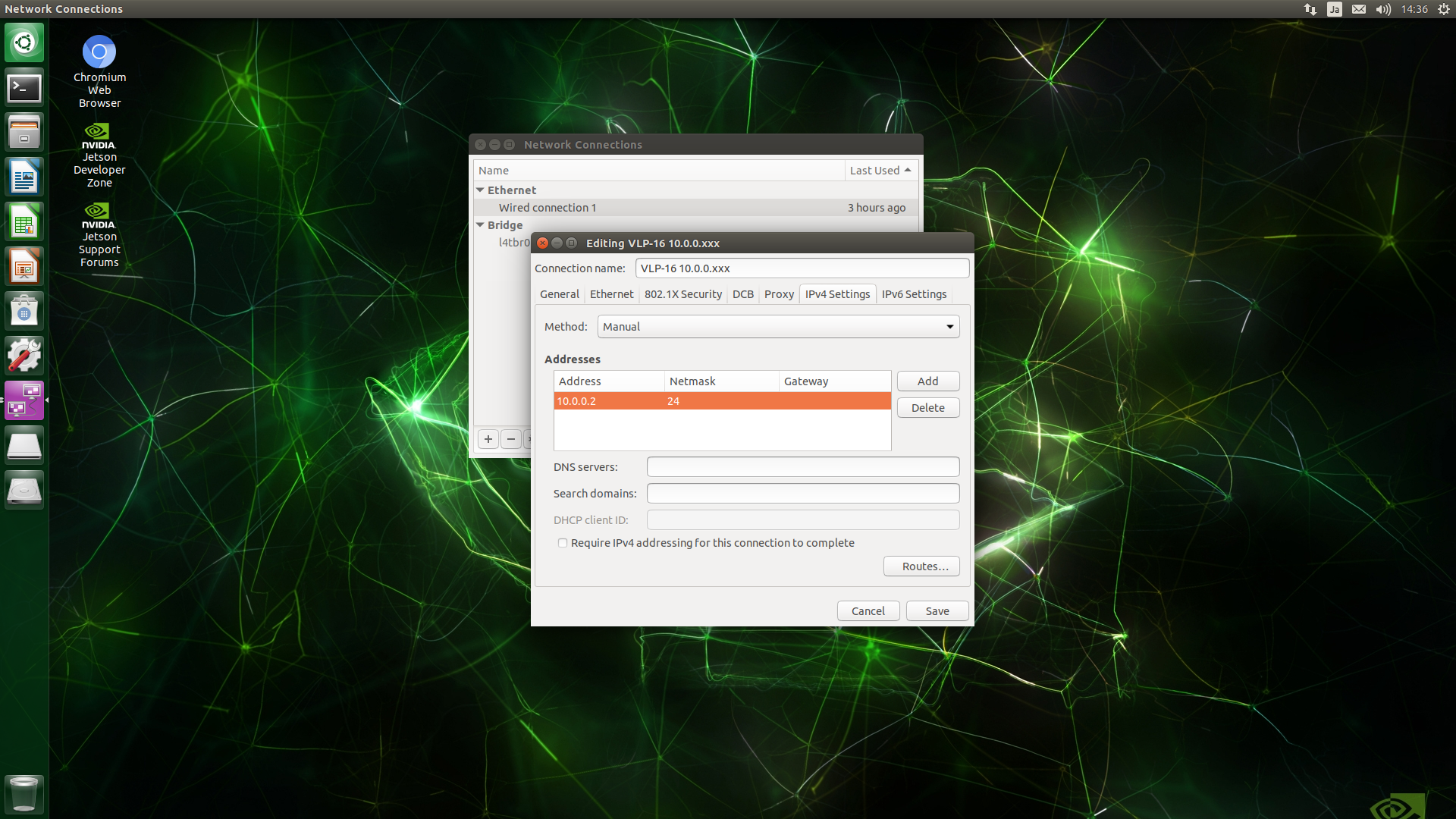
【Ubuntuネットワーク作成】
UbuntuからVLP-16にアクセスするためのネットワークを作成します。
PCのIPアドレスを10.0.0.2に固定にします。
 WiFiをインターネットに接続し、LANをVLP-16に接続した状態にします。
WiFiをインターネットに接続し、LANをVLP-16に接続した状態にします。
TX2のWiFiは非常に遅いため、インターネット用のLANも作成しておくと便利です。
データ転送時間:WiFi 1時間 -> LAN 10分に短縮
【VLP-16設定】
VLP-16の工場出荷時の設定では、マルチキャスト配信になっています。
これは家庭用NECルータでは処理できず、ネットワークがダウンしてしまうため、10.0.0.2に対してセンサー情報を流すように設定します。
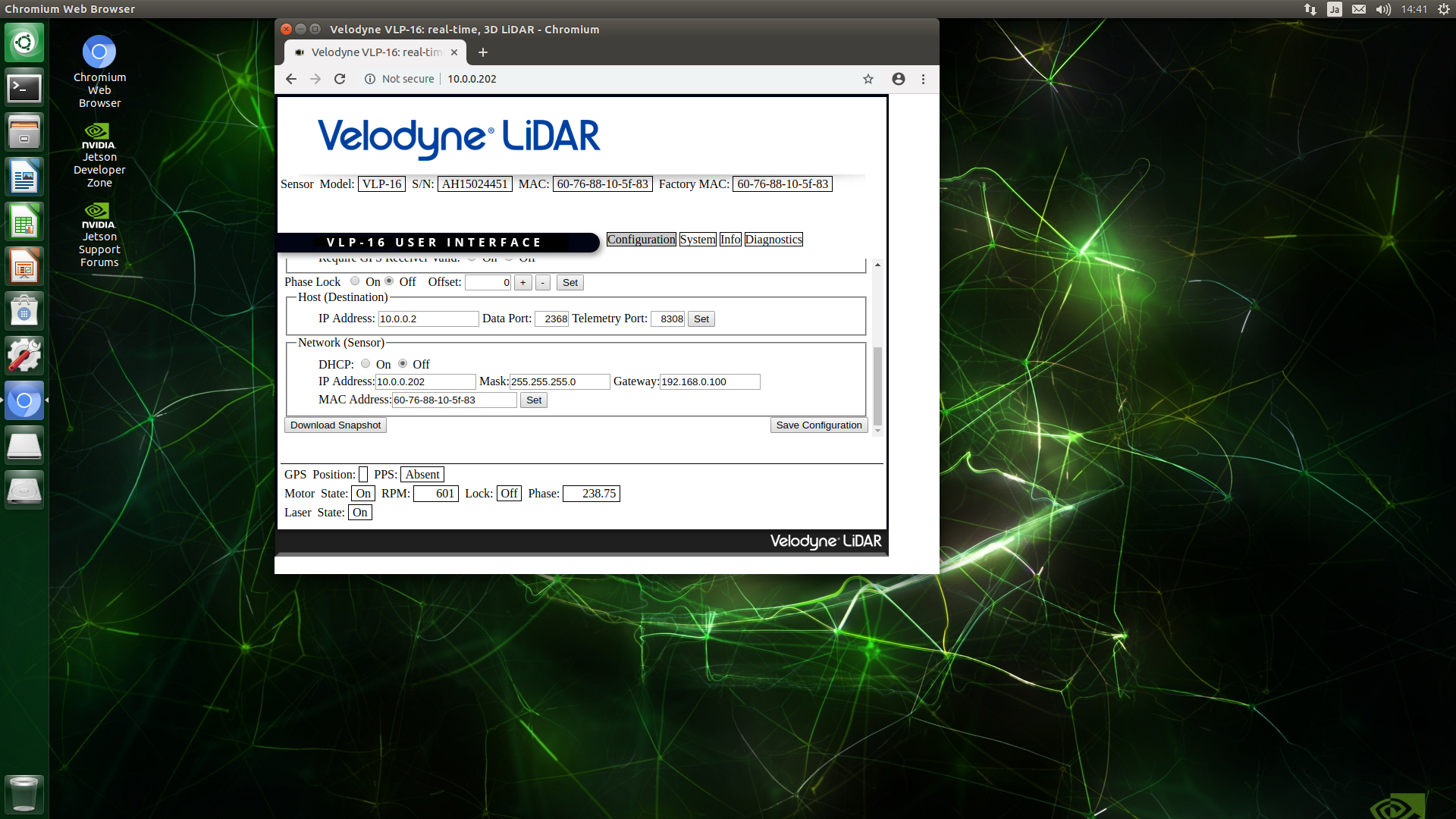 設定後、VLP-16の電源を入れ直します。
設定後、VLP-16の電源を入れ直します。
ネットワーク上にVLP-16があることを確認します。
1 2 | sudo apt-get install arp-scan sudo arp-scan -l |
10.0.0.202 60:76:88:10:5f:83 Velodyne
【VLP-16 製品仕様】
https://www.argocorp.com/cam/special/Velodyne/common/pdf/VLP-16.pdf
| 項目 | 値 |
|---|---|
| 電源 | DC 9-18V |
| 消費電力量 | 8W |
| 測定ポイント数 | 30万ポイント/秒 |
| 測定精度 | 25m距離で誤差3cm |
| 測定距離 | 100m |