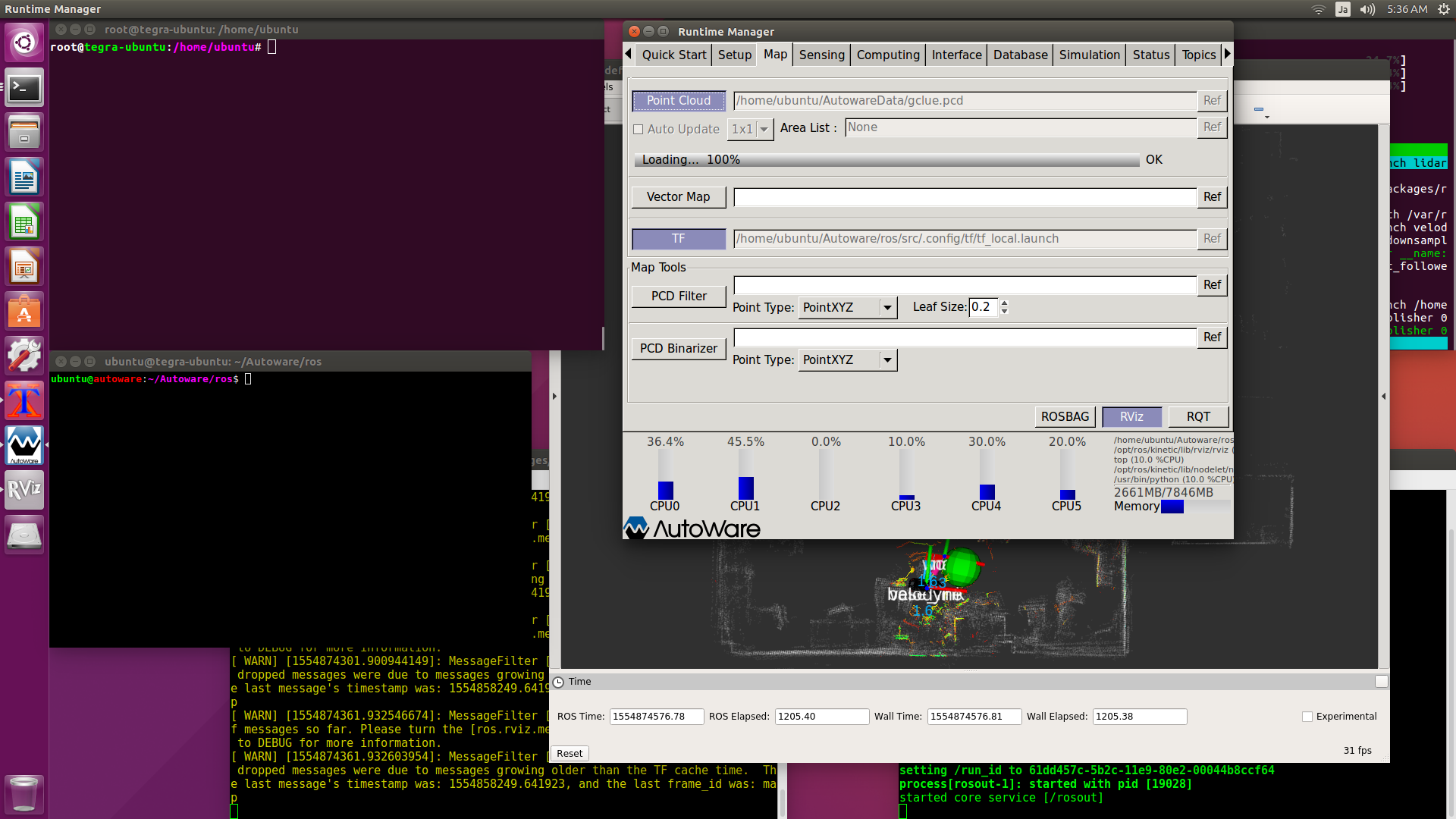
[Map]タブ
【PointCloud】
部屋のマップを読み込みます。
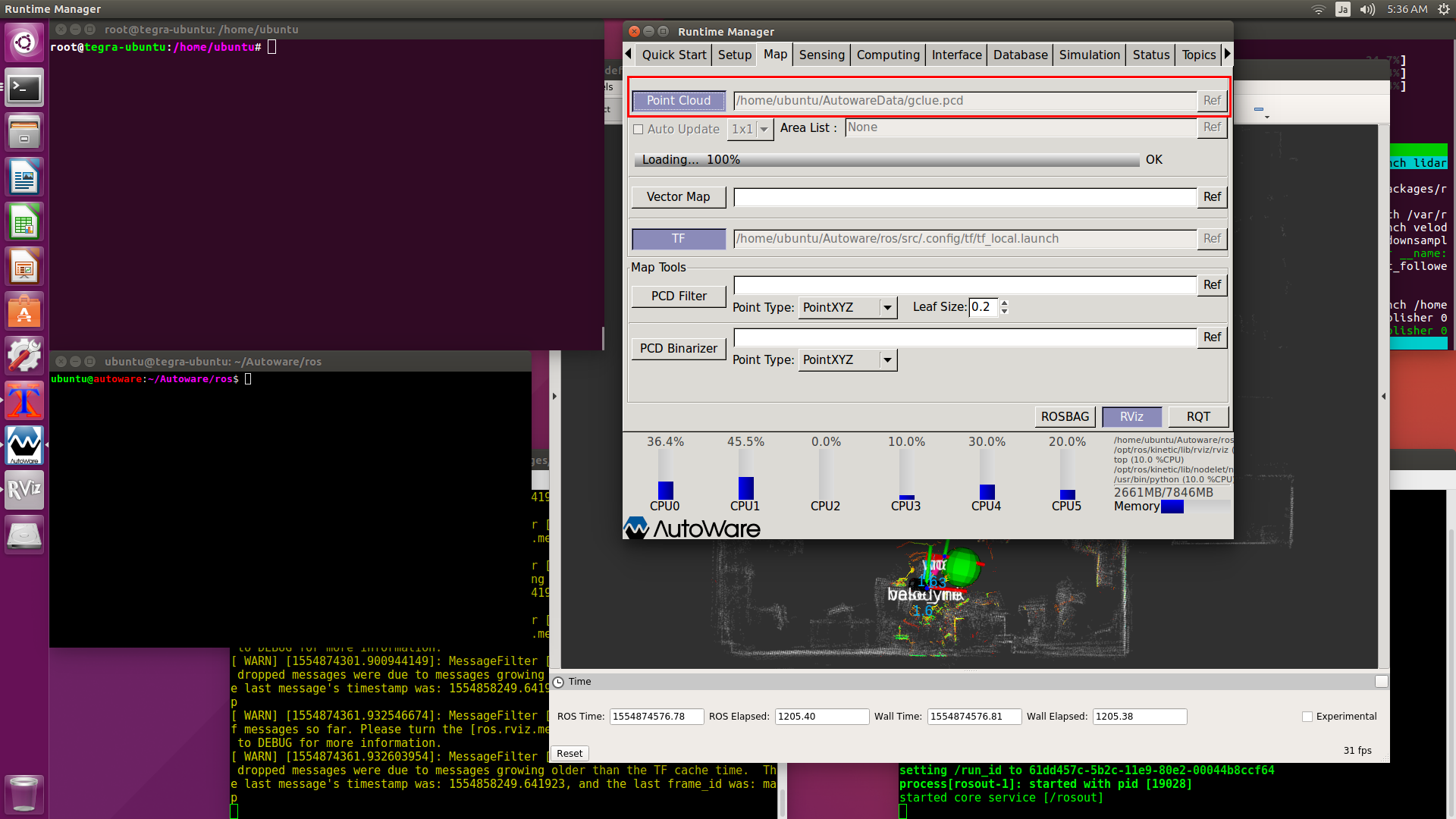
ポイント密度が濃いと処理が重くなり、走行中の自己位置推定が失敗しやすくなります。
空間を立方体で分割したものをvoxelとして扱っているので、ポイント密度が薄くてもデメリットにはなりにくいと思います。
【TF】
自己位置推定の初期化に使うローカル座標を読み込みます。
~/Autoware/ros/src/config/tf/tf_local.launchにあるファイルを使います。
部屋のマップを読み込みます。
ポイント密度が濃いと処理が重くなり、走行中の自己位置推定が失敗しやすくなります。
空間を立方体で分割したものをvoxelとして扱っているので、ポイント密度が薄くてもデメリットにはなりにくいと思います。
自己位置推定の初期化に使うローカル座標を読み込みます。
~/Autoware/ros/src/config/tf/tf_local.launchにあるファイルを使います。