1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
489
490
491
492
493
494
495
496
497
498
499
500
501
502
503
504
505
506
507
508
509
510
511
512
513
514
515
516
517
518
519
520
521
522
523
524
525
526
527
528
529
530
531
532
533
534
535
536
537
538
539
540
541
542
543
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
605
606
607 | import numpy as np
import omni.timeline
import omni.ui as ui
from omni.isaac.ui.element_wrappers import (
Button,
CollapsableFrame,
IntField,
StringField,
)
from omni.isaac.ui.ui_utils import get_style
from pxr import Usd, UsdGeom, Gf
import omni.usd
from omni.isaac.sensor import Camera
import omni.isaac.core.utils.numpy.rotations as rot_utils
import threading
import asyncio
import socket
import struct
import time
from PIL import Image
import io
class UIBuilder:
def __init__(self):
"""
初期化メソッド。
Isaac SIMが起動した際に一度呼び出されます。
"""
# UI要素のリストを初期化
self.wrapped_ui_elements = []
# タイムラインインターフェースを取得(再生・停止・一時停止を制御します)
self._timeline = omni.timeline.get_timeline_interface()
# カメラセンサーの初期化
self.camera_sensor = None
# カメラの回転がアクティブかどうかのフラグ
self.rotation_active = False
def on_menu_callback(self):
"""
ツールバーからUIが開かれたときに呼び出されるコールバック。
build_ui()の直後に呼び出されます。
"""
print("on_menu_callback")
def on_timeline_event(self, event):
"""
タイムラインイベント(再生、停止、一時停止)のコールバック。
Args:
event (omni.timeline.TimelineEventType): イベントの種類
"""
# イベントの処理をここに記述します(必要に応じて)
pass
def on_physics_step(self, dt):
"""
物理ステップごとに呼び出されるコールバック。
タイムラインが再生されているときにのみ発生します。
Args:
dt (float): 物理ステップのサイズ
"""
if self.rotation_active and self.camera_sensor:
# ステージからカメラのプライムパスを取得します
stage = omni.usd.get_context().get_stage()
prim = stage.GetPrimAtPath(self.camera_sensor.prim_path)
if not prim.IsValid():
print(f"カメラのプライムパス {self.camera_sensor.prim_path} が無効です。")
return
# カメラのXformable APIを使用して変換操作を取得します
xformable = UsdGeom.Xformable(prim)
xform_ops = xformable.GetOrderedXformOps()
# 既存の回転操作を検索します。なければ新規に作成します
rotate_op = None
for op in xform_ops:
if op.GetOpType() == UsdGeom.XformOp.TypeRotateXYZ:
rotate_op = op
break
if rotate_op is None:
rotate_op = xformable.AddXformOp(
UsdGeom.XformOp.TypeRotateXYZ,
UsdGeom.XformOp.PrecisionDouble
)
# 現在の回転角度を取得します
current_rotation = rotate_op.Get(Usd.TimeCode.Default())
if current_rotation is None:
current_rotation = Gf.Vec3d(0.0, 0.0, 0.0)
# y軸周りの回転角度を更新します
delta_angle = 1.0 # フレームごとの回転角度(度)
new_rotation = Gf.Vec3d(
current_rotation[0],
(current_rotation[1] + delta_angle) % 360.0,
current_rotation[2]
)
# 新しい回転角度を設定します
rotate_op.Set(new_rotation, Usd.TimeCode.Default())
def on_stage_event(self, event):
"""
ステージイベントのコールバック。
Args:
event (omni.usd.StageEventType): イベントタイプ
"""
print(f"event type: {event.type}")
# 必要に応じてイベントの処理を記述します
pass
def cleanup(self):
"""
ステージが閉じられたときや拡張機能がホットリロードされたときに呼び出されます。
必要なクリーンアップ処理を行い、アクティブなコールバック関数を削除します。
"""
print("cleanup")
# UIエレメントのクリーンアップ
for ui_elem in self.wrapped_ui_elements:
ui_elem.cleanup()
# ストリーミングがアクティブであれば停止します
if hasattr(self, 'streaming_active') and self.streaming_active:
self.streaming_active = False
if hasattr(self, 'streaming_thread'):
self.streaming_thread.join()
del self.streaming_thread
if hasattr(self, 'sock'):
self.sock.close()
del self.sock
print("ストリーミングを停止しました。")
# 物理ステップイベントの購読を解除
if hasattr(self, '_physics_sub') and self._physics_sub:
self._physics_sub.unsubscribe()
self._physics_sub = None
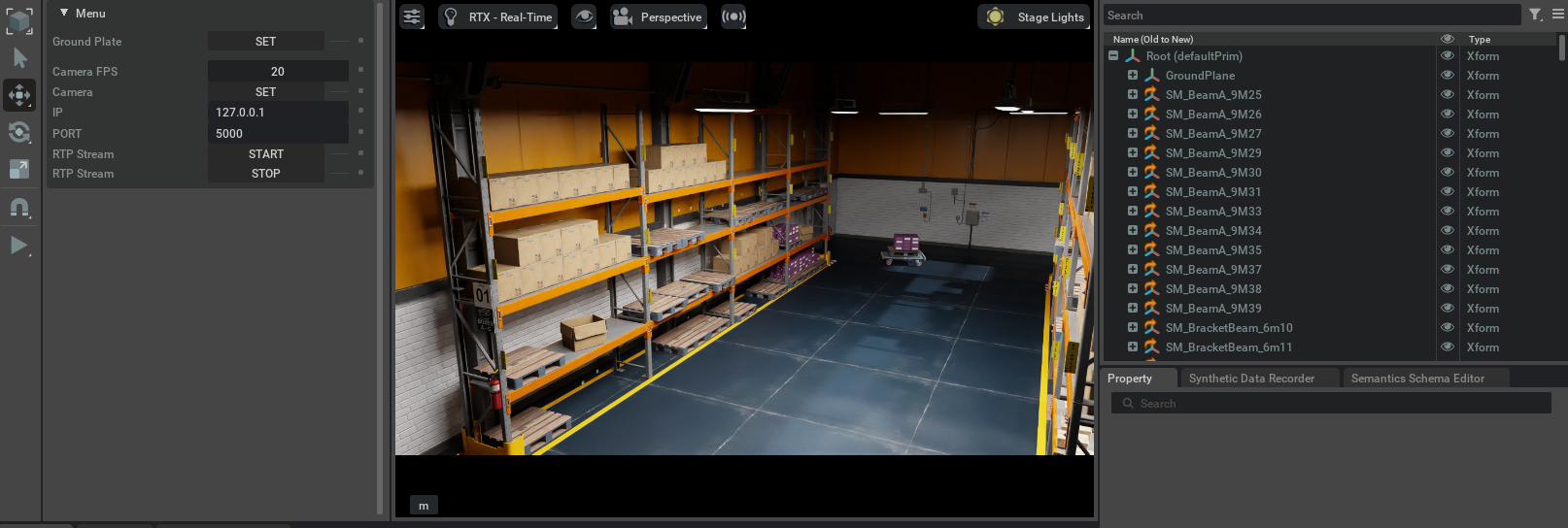
def build_ui(self):
"""
カスタムUIツールを構築して、拡張機能を実行します。
この関数は、UIウィンドウが閉じて再度開かれるたびに呼び出されます。
"""
print("build_ui")
# メニューのフレームを作成します
object_map = CollapsableFrame("Menu", collapsed=False)
with object_map:
with ui.VStack(style=get_style(), spacing=5, height=0):
with ui.VStack():
# グラウンドプレーンを設定するボタンを作成します
groundplane_button = Button(
"Ground Plate",
"Set",
on_click_fn=self._on_set_groundplane,
)
ui.Spacer(height=10)
# カメラのFPSを設定するフィールドを作成します
self.camera_fps_field = IntField(
"Camera FPS",
default_value=20,
lower_limit=0,
upper_limit=60,
)
# カメラを設定するボタンを作成します
camera_button = Button(
"Camera",
"Set",
on_click_fn=self._on_set_camera,
)
# ストリーミング先のIPアドレスを入力するフィールドを作成します
self.ip_field = StringField(
"IP",
default_value="127.0.0.1",
read_only=False,
multiline_okay=False,
)
# ストリーミング先のポート番号を入力するフィールドを作成します
self.port_field = StringField(
"PORT",
default_value="5000",
read_only=False,
multiline_okay=False,
)
# ストリーミングを開始するボタンを作成します
start_button = Button(
"RTP Stream",
"Start",
on_click_fn=self._on_stream_start,
)
# ストリーミングを停止するボタンを作成します
stop_button = Button(
"RTP Stream",
"Stop",
on_click_fn=self._on_stream_stop,
)
# UIエレメントのリストに追加します
self.wrapped_ui_elements.extend([
groundplane_button,
self.camera_fps_field,
camera_button,
self.ip_field,
self.port_field,
start_button,
stop_button
])
def _on_set_groundplane(self):
"""
グラウンドプレーンのボタンが押されたときに呼び出されるメソッド。
シーンを読み込みます。
"""
asyncio.ensure_future(self._set_groundplane_async())
async def _set_groundplane_async(self):
"""
非同期でグラウンドプレーンのシーンをロードします。
"""
usd_file_path = "http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/4.0/Isaac/Environments/Simple_Warehouse/warehouse_multiple_shelves.usd"
await omni.usd.get_context().open_stage_async(usd_file_path)
print("USDシーンがロードされました")
def _on_set_camera(self):
"""
カメラの設定ボタンが押されたときに呼び出されるメソッド。
カメラを設定します。
"""
try:
print("カメラを初期化します...")
# カメラの位置と向きを設定します
position = np.array([0.0, 0.0, 1.0])
orientation_euler = np.array([0, 0, 0]) # オイラー角(度)
orientation_quat = rot_utils.euler_angles_to_quats(orientation_euler, degrees=True)
# UIからFPSの値を取得します
fps_value = self.camera_fps_field.get_value()
self.camera_fps = fps_value # 他のメソッドでも使用できるように保存
# カメラセンサーを初期化します
self.camera_sensor = Camera(
prim_path="/World/Camera",
position=position,
frequency=fps_value,
resolution=(224, 224),
orientation=orientation_quat,
)
self.camera_sensor.initialize()
except Exception as e:
print(f"エラーが発生しました: {e}")
def _on_stream_stop(self):
"""
ストリーミングを停止します。
"""
if hasattr(self, 'streaming_active') and self.streaming_active:
self.streaming_active = False
# ストリーミング停止時にカメラの回転を停止します
self.rotation_active = False
# スレッドの終了を待機します
if hasattr(self, 'streaming_thread'):
self.streaming_thread.join()
del self.streaming_thread
if hasattr(self, 'sock'):
self.sock.close()
del self.sock
print("ストリーミングを停止しました。")
else:
print("ストリーミングは既に停止しています。")
# タイムラインを停止します
self._timeline.stop()
self.rotation_active = False
def _on_stream_start(self):
"""
ストリーム開始ボタンが押されたときに呼び出されるメソッド。
ストリーミングを開始します。
"""
# UIフィールドからIPとポートを取得します
ip_value = self.ip_field.get_value().strip()
port_value = self.port_field.get_value().strip()
try:
# IPアドレスの検証
socket.inet_aton(ip_value)
self.destination_ip = ip_value
except socket.error:
print("エラー: 有効なIPアドレスを入力してください。")
return
try:
# ポート番号の検証
port = int(port_value)
if 0 <= port <= 65535:
self.destination_port = port
else:
print("エラー: ポート番号は0から65535の間で指定してください。")
return
except ValueError:
print("エラー: 有効なポート番号を入力してください。")
return
# ストリーミングを開始します
self.start_streaming()
# タイムラインを再生します
self._timeline.play()
self.rotation_active = True
def start_streaming(self):
"""
ストリーミングを開始します。
"""
if hasattr(self, 'streaming_active') and self.streaming_active:
print("既にストリーミングが開始されています。")
return
self.streaming_active = True
self.sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
# ストリームを別スレッドで開始します
self.streaming_thread = threading.Thread(
target=self.stream_jpeg_rtp,
args=(self.destination_ip, self.destination_port)
)
self.streaming_thread.daemon = True # メインプログラムと一緒に終了するようにデーモン化
self.streaming_thread.start()
print(f"別スレッドでストリーミングを開始しました。送信先: {self.destination_ip}:{self.destination_port}")
def stream_jpeg_rtp(self, destination_ip, destination_port):
"""
カメラからJPEGデータを取得し、RTPでストリーミングします。
Args:
destination_ip (str): 送信先のIPアドレス
destination_port (int): 送信先のポート番号
"""
sequence_number = 0x00
ssrc = 0xb18b8be8
start_time = time.time()
try:
while self.streaming_active:
timestamp = int((time.time() - start_time) * 90000)
jpeg_data = self.raw_to_jpeg()
sequence_number = self.send_jpeg_frame(
self.sock, sequence_number, timestamp, ssrc,
jpeg_data, destination_ip, destination_port
)
time.sleep(1 / self.camera_fps) # UIから取得したFPSの値を使用
except Exception as e:
print(f"ストリーミング中にエラーが発生しました: {e}")
finally:
if hasattr(self, 'sock'):
self.sock.close()
print("ストリーミングスレッドを終了しました。")
def raw_to_jpeg(self):
"""
カメラセンサーから画像を取得し、JPEG形式に変換します。
Returns:
bytes: JPEGデータ
"""
try:
# カメラのプライムパスが有効か確認します
if self.camera_sensor.prim_path is None:
print("エラー: カメラのプライムパスがNoneです。")
return None
# ステージを取得します
stage = omni.usd.get_context().get_stage()
if stage is None:
print("エラー: ステージが初期化されていません。")
return None
# カメラのプライムを取得します
prim = stage.GetPrimAtPath(self.camera_sensor.prim_path)
if not prim.IsValid():
print(f"エラー: 無効なプライムパス {self.camera_sensor.prim_path}。")
return None
# 画像データを取得します
if hasattr(self.camera_sensor, 'get_rgba'):
raw_image = self.camera_sensor.get_rgba()
elif hasattr(self.camera_sensor, 'get_rgb'):
raw_image = self.camera_sensor.get_rgb()
else:
print("カメラオブジェクトに画像データ取得メソッドがありません。")
return None
if raw_image is None or len(raw_image) == 0:
print("カメラから画像データが取得できませんでした。")
return None
# 画像の変換(RGBAからRGB)
if raw_image.shape[-1] == 4:
raw_image_rgb = raw_image[:, :, :3]
else:
raw_image_rgb = raw_image
# PILイメージに変換します
pil_image = Image.fromarray(raw_image_rgb.astype('uint8'))
# JPEG形式に変換します
jpeg_image_io = io.BytesIO()
pil_image.save(jpeg_image_io, format="JPEG")
return jpeg_image_io.getvalue()
except Exception as e:
print(f"エラーが発生しました: {e}")
return None
def send_jpeg_frame(self, sock, seq_num, timestamp, ssrc, jpeg_data, destination_ip, destination_port):
"""
JPEGデータをRTPパケットとして送信します。
Args:
sock (socket.socket): ソケットオブジェクト
seq_num (int): シーケンス番号
timestamp (int): タイムスタンプ
ssrc (int): SSRC
jpeg_data (bytes): JPEGデータ
destination_ip (str): 送信先のIPアドレス
destination_port (int): 送信先のポート番号
Returns:
int: 次のシーケンス番号
"""
if jpeg_data is None:
print("エラー: JPEGデータがNoneです。ストリーミングできません。")
return seq_num # データがない場合、シーケンス番号を変更せずに返す
width, height = 224, 224 # フレームの幅と高さ
total_size = len(jpeg_data)
offset = 0
first_packet = True
MTU_SIZE = 1400 # ネットワークMTUに基づく適切なサイズ
quant_tables = self.extract_quantization_tables(jpeg_data)
jpeg_raw = self.find_sos_marker(jpeg_data)
while offset < total_size:
# 最初のパケットは追加のJPEGヘッダがあるためペイロードサイズを調整
if first_packet:
max_payload_size = MTU_SIZE - 12 - 8 - 132
else:
max_payload_size = MTU_SIZE - 12 - 8
fragment_size = min(max_payload_size, total_size - offset)
is_last_packet = (offset + fragment_size) >= total_size
# RTPヘッダを作成します
rtp_header = self.create_rtp_jpeg_header(
seq_num, timestamp, ssrc, offset, width, height,
first_packet, is_last_packet, quant_tables if first_packet else None
)
if rtp_header is None:
print("エラー: RTPヘッダの作成に失敗しました。パケットをスキップします。")
return seq_num # または適切なエラーハンドリング
# RTPペイロードを作成します
jpeg_fragment = jpeg_raw[offset:offset + fragment_size]
rtp_packet = rtp_header + jpeg_fragment
# RTPパケットを送信します
sock.sendto(rtp_packet, (destination_ip, destination_port))
# オフセットとシーケンス番号を更新します
offset += fragment_size
seq_num = (seq_num + 1) % 65536 # シーケンス番号をラップアラウンド
first_packet = False
return seq_num
def create_rtp_jpeg_header(self, seq_num, timestamp, ssrc, offset, width, height, is_first_packet, is_last_packet, quant_tables):
"""
JPEGストリーミングのためのRTPヘッダを生成します。
Args:
seq_num (int): シーケンス番号
timestamp (int): タイムスタンプ
ssrc (int): SSRC
offset (int): オフセット
width (int): 幅
height (int): 高さ
is_first_packet (bool): 最初のパケットかどうか
is_last_packet (bool): 最後のパケットかどうか
quant_tables (list): 量子化テーブル
Returns:
bytes: RTPヘッダデータ
"""
# RTPヘッダ(12バイト)
version = 2 << 6
padding = 0
extension = 0
csrc_count = 0
marker = 1 if is_last_packet else 0
payload_type = 26 # JPEG RTPペイロードタイプ
try:
rtp_header = struct.pack(
'!BBHII',
version | padding | extension | csrc_count,
marker << 7 | payload_type,
seq_num,
timestamp,
ssrc
)
except Exception as e:
print(f"RTPヘッダの作成中にエラー: {e}")
return None # エラー時はNoneを返す
# JPEGヘッダの作成
offset_high = (offset >> 16) & 0xFF
offset_mid = (offset >> 8) & 0xFF
offset_low = offset & 0xFF
jpeg_width = (width // 8) & 0xFF
jpeg_height = (height // 8) & 0xFF
type_specific = 0
q = 255 # 品質、デフォルトは255
# JPEGヘッダ(8バイト)
jpeg_header = struct.pack(
'!BBBBBBBB',
type_specific,
offset_high,
offset_mid,
offset_low,
0x01, # JPEGタイプ(ベースラインの場合は常に1)
q, # 品質(量子化テーブル)
jpeg_width,
jpeg_height
)
if is_first_packet:
# 追加のヘッダ
additional_header = struct.pack('!BBBB', 0x00, 0x00, 0x00, 0x80)
full_header = jpeg_header + additional_header
# 最初のパケットの場合、量子化テーブルを追加
if quant_tables:
quant_header = b''.join(table[1:] for table in quant_tables)
return rtp_header + full_header + quant_header
else:
return rtp_header + full_header
else:
return rtp_header + jpeg_header
def find_sos_marker(self, jpeg_data):
"""
JPEGデータ内のStart of Scan (SOS) マーカーを見つけます。
Args:
jpeg_data (bytes): JPEGデータ
Returns:
bytes: SOSマーカー以降のデータ
"""
sos_marker = b'\xFF\xDA' # SOSマーカー
sos_index = jpeg_data.find(sos_marker)
if sos_index == -1:
raise ValueError("SOSマーカー (0xFFDA) がJPEGデータ内に見つかりません。")
# SOSマーカーの直後からデータが始まります
return jpeg_data[sos_index + 14:]
def extract_quantization_tables(self, jpeg_data):
"""
JPEGデータから量子化テーブルを抽出します。
Args:
jpeg_data (bytes): JPEGバイナリデータ
Returns:
list: 量子化テーブルのリスト
"""
quant_tables = []
# DQTマーカー(Define Quantization Table)を検索
dqt_marker = b'\xFF\xDB'
index = jpeg_data.find(dqt_marker)
while index != -1:
length = struct.unpack('>H', jpeg_data[index + 2:index + 4])[0]
table_data = jpeg_data[index + 4:index + 4 + length - 2]
quant_tables.append(table_data)
index = jpeg_data.find(dqt_marker, index + 4)
return quant_tables
|