1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155 | import numpy as np
import omni.timeline
import omni.ui as ui
from omni.isaac.ui.element_wrappers import CollapsableFrame, DropDown, FloatField, TextBlock
from omni.isaac.ui.ui_utils import get_style
from omni.isaac.ui.element_wrappers import Button
from pxr import Usd, UsdGeom, Sdf, Gf, UsdPhysics, UsdShade, PhysxSchema
from omni.physx.scripts import physicsUtils
import omni.usd
class UIBuilder:
def __init__(self):
"""enableの状態だとIsaac SIMが起動した際に1度呼び出される
"""
# フレームは、複数のUI要素を含むことができるサブウィンドウです
self.frames = []
# UI要素は、omni.isaac.ui.element_wrappers の UIElementWrapper を使用して作成されます
self.wrapped_ui_elements = []
# タイムラインにアクセスして、プログラム上で停止/一時停止/再生を制御します
self._timeline = omni.timeline.get_timeline_interface()
# __on_init()を呼び出し
self._on_init()
def on_menu_callback(self):
"""ツールバーからUIが開かれたときに呼び出されるコールバック。
これは、build_ui()の直後に呼び出されます。
"""
print("on_menu_callback")
def on_timeline_event(self, event):
"""タイムラインイベント(再生、停止、一時停止)のコールバック
Args:
event (omni.timeline.TimelineEventType): イベントの種類
"""
#print("on_timeline_event")
pass
def on_physics_step(self, step):
"""物理ステップのコールバック。
物理ステップは、タイムラインが再生されているときにのみ発生します
Args:
step (float): 物理ステップのサイズ
"""
#print("on_physics_step")
pass
def on_stage_event(self, event):
"""ステージイベントのコールバック
Args:
event (omni.usd.StageEventType): イベントタイプ
"""
print(f"event type: {event.type}")
pass
def cleanup(self):
"""
ステージが閉じられたときや拡張機能がホットリロードされたときに呼び出されます。
必要なクリーンアップ処理を行い、アクティブなコールバック関数を削除します。
omni.isaac.ui.element_wrappersからインポートされたボタンは、
クリーンアップ関数を実装しているので、それを呼び出す必要があります。
"""
print("cleanup")
for ui_elem in self.wrapped_ui_elements:
ui_elem.cleanup()
def build_ui(self):
"""
カスタムUIツールを構築して、拡張機能を実行します。
この関数は、UIウィンドウが閉じて再度開かれるたびに呼び出されます。
"""
print("build_ui")
# ボタンUIの作成
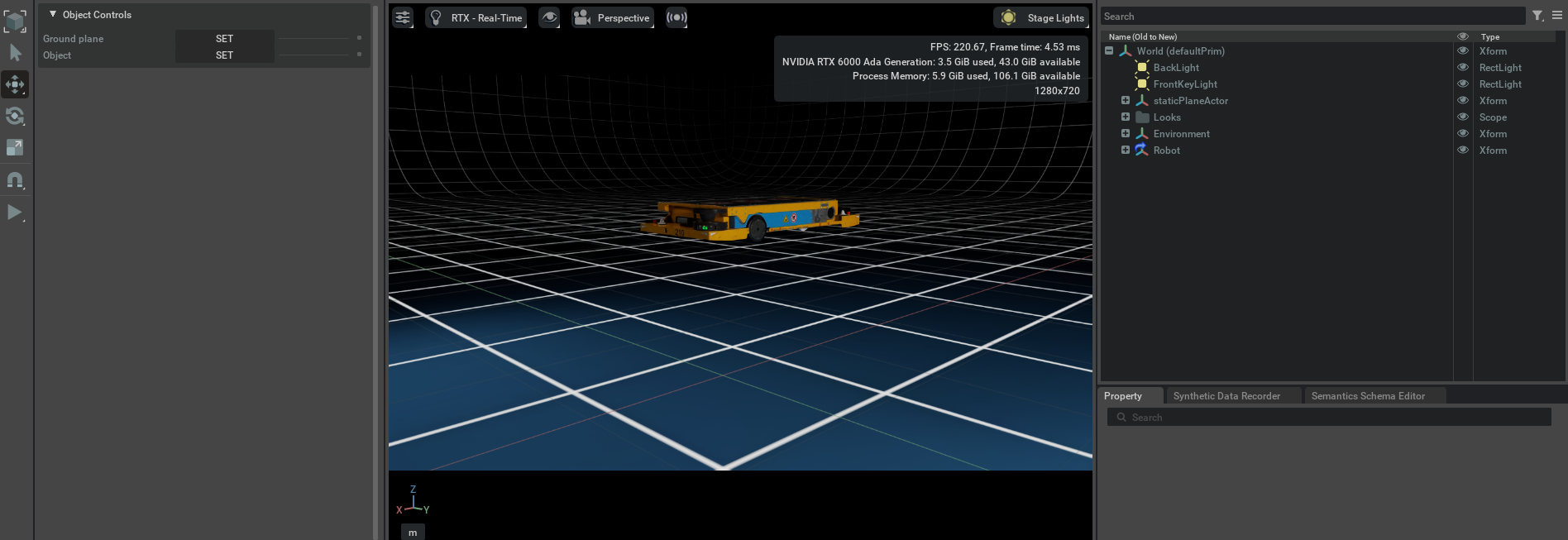
object_map = CollapsableFrame("Object Controls", collapsed=False)
with object_map:
with ui.VStack(style=get_style(), spacing=5, height=0):
with ui.VStack():
grandplate_button = Button(
"Ground plane",
"SET",
on_click_fn=self._on_set_groudplane,
)
robot_button = Button(
"Object",
"SET",
on_click_fn=self._on_set_object,
)
self.wrapped_ui_elements.extend([grandplate_button, robot_button])
def _on_set_groudplane(self):
"""
ボタンが押されたら呼ばれる
"""
# シーンを読み込む
usd_file_path = "http://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/4.1/Isaac/Environments/Grid/gridroom_curved.usd"
omni.usd.get_context().open_stage(usd_file_path)
print("USDシーンがロードされました")
def _on_set_object(self):
"""
USDシーンにRobotオブジェクトを追加し、位置、スケール、回転、剛体物理と衝突設定を行う
"""
# USDステージのコンテキストを取得
context = omni.usd.get_context()
stage = context.get_stage() # self.stageではなく、ここで直接取得する
# オブジェクトのパスを指定
prim_path = '/World/Robot'
# 現在の編集対象レイヤーを取得
edit_target = stage.GetEditTarget()
current_layer = edit_target.GetLayer()
# 新しいプリム(オブジェクト)を作成
prim_spec = Sdf.CreatePrimInLayer(current_layer, prim_path)
# RobotオブジェクトのUSDファイルをペイロードとしてロード
prim_spec.payloadList.Prepend(Sdf.Payload(
'omniverse://localhost/NVIDIA/Assets/Isaac/4.2/Isaac/Robots/Idealworks/iw_hub_sensors.usd',
Sdf.Path.emptyPath))
# Robotオブジェクトを取得
robot_prim = stage.GetPrimAtPath(prim_path)
# オブジェクトが正しく取得できたか確認
if not robot_prim.IsValid():
print(f"Error: Could not load prim at {prim_path}")
return
# Robotの位置、スケール、回転を設定
xformable = UsdGeom.Xformable(robot_prim)
# 位置を設定(既存の translate op があるか確認)
if xformable.GetOrderedXformOps():
translate_ops = [op for op in xformable.GetOrderedXformOps() if op.GetOpName() == 'xformOp:translate']
if translate_ops:
translate_ops[0].Set(Gf.Vec3f(0.0, 0.0, 1.0))
else:
xformable.AddTranslateOp().Set(Gf.Vec3f(0.0, 0.0, 1.0))
else:
xformable.AddTranslateOp().Set(Gf.Vec3f(0.0, 0.0, 1.0))
print(f"Robot {prim_path} added, rotated by 180 degrees, and configured.")
def _on_init(self):
print("_on_init")
|