1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153 | # Copyright (c) 2022-2024, The Isaac Lab Project Developers.
# All rights reserved.
#
# SPDX-License-Identifier: BSD-3-Clause
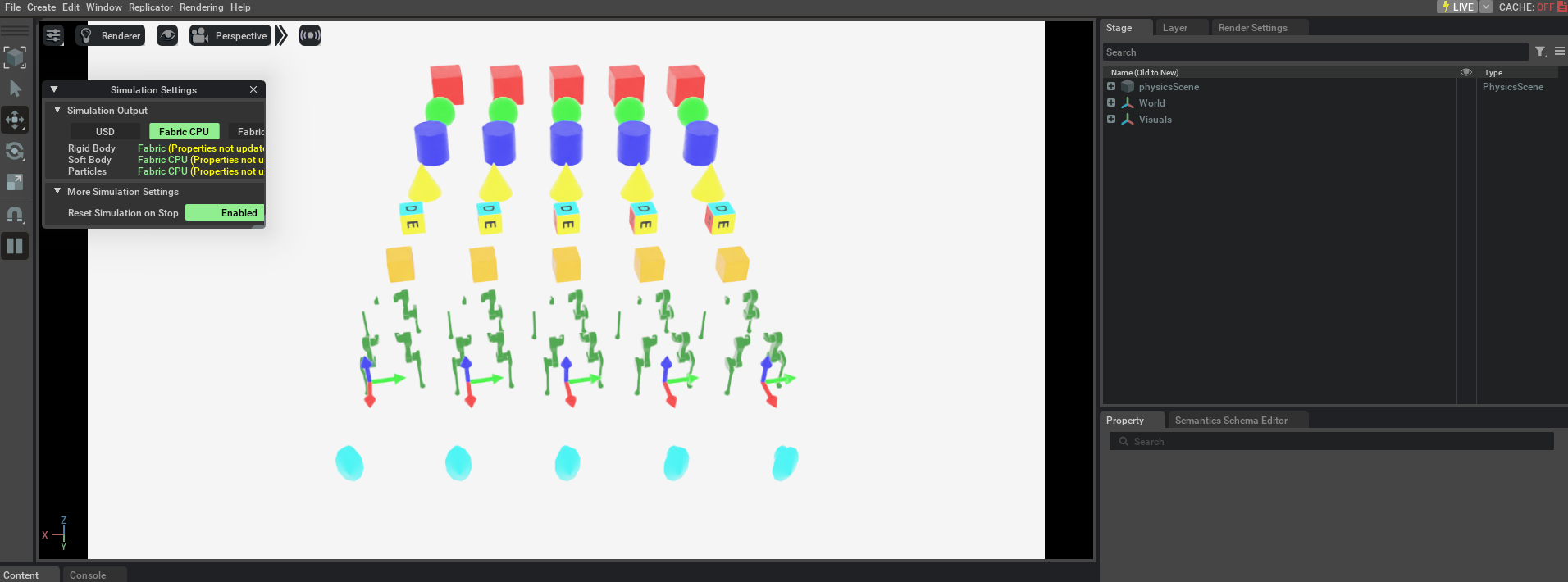
"""This script demonstrates different types of markers.
.. code-block:: bash
# Usage
./isaaclab.sh -p source/standalone/demos/markers.py
"""
"""Launch Isaac Sim Simulator first."""
import argparse
from omni.isaac.lab.app import AppLauncher
# add argparse arguments
parser = argparse.ArgumentParser(description="This script demonstrates different types of markers.")
# append AppLauncher cli args
AppLauncher.add_app_launcher_args(parser)
# parse the arguments
args_cli = parser.parse_args()
# launch omniverse app
app_launcher = AppLauncher(args_cli)
simulation_app = app_launcher.app
"""Rest everything follows."""
import torch
import omni.isaac.lab.sim as sim_utils
from omni.isaac.lab.markers import VisualizationMarkers, VisualizationMarkersCfg
from omni.isaac.lab.sim import SimulationContext
from omni.isaac.lab.utils.assets import ISAAC_NUCLEUS_DIR, ISAACLAB_NUCLEUS_DIR
from omni.isaac.lab.utils.math import quat_from_angle_axis
def define_markers() -> VisualizationMarkers:
"""Define markers with various different shapes."""
marker_cfg = VisualizationMarkersCfg(
prim_path="/Visuals/myMarkers",
markers={
"frame": sim_utils.UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/UIElements/frame_prim.usd",
scale=(0.5, 0.5, 0.5),
),
"arrow_x": sim_utils.UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/UIElements/arrow_x.usd",
scale=(1.0, 0.5, 0.5),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 1.0)),
),
"cube": sim_utils.CuboidCfg(
size=(1.0, 1.0, 1.0),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),
),
"sphere": sim_utils.SphereCfg(
radius=0.5,
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0)),
),
"cylinder": sim_utils.CylinderCfg(
radius=0.5,
height=1.0,
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 0.0, 1.0)),
),
"cone": sim_utils.ConeCfg(
radius=0.5,
height=1.0,
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 1.0, 0.0)),
),
"mesh": sim_utils.UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/DexCube/dex_cube_instanceable.usd",
scale=(10.0, 10.0, 10.0),
),
"mesh_recolored": sim_utils.UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/DexCube/dex_cube_instanceable.usd",
scale=(10.0, 10.0, 10.0),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.25, 0.0)),
),
"robot_mesh": sim_utils.UsdFileCfg(
usd_path=f"{ISAACLAB_NUCLEUS_DIR}/Robots/ANYbotics/ANYmal-D/anymal_d.usd",
scale=(2.0, 2.0, 2.0),
visual_material=sim_utils.GlassMdlCfg(glass_color=(0.0, 0.1, 0.0)),
),
},
)
return VisualizationMarkers(marker_cfg)
def main():
"""Main function."""
# Load kit helper
sim = SimulationContext(sim_utils.SimulationCfg(dt=0.01))
# Set main camera
sim.set_camera_view([0.0, 18.0, 12.0], [0.0, 3.0, 0.0])
# Spawn things into stage
# Lights
cfg = sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75))
cfg.func("/World/Light", cfg)
# create markers
my_visualizer = define_markers()
# define a grid of positions where the markers should be placed
num_markers_per_type = 5
grid_spacing = 2.0
# Calculate the half-width and half-height
half_width = (num_markers_per_type - 1) / 2.0
half_height = (my_visualizer.num_prototypes - 1) / 2.0
# Create the x and y ranges centered around the origin
x_range = torch.arange(-half_width * grid_spacing, (half_width + 1) * grid_spacing, grid_spacing)
y_range = torch.arange(-half_height * grid_spacing, (half_height + 1) * grid_spacing, grid_spacing)
# Create the grid
x_grid, y_grid = torch.meshgrid(x_range, y_range, indexing="ij")
x_grid = x_grid.reshape(-1)
y_grid = y_grid.reshape(-1)
z_grid = torch.zeros_like(x_grid)
# marker locations
marker_locations = torch.stack([x_grid, y_grid, z_grid], dim=1)
marker_indices = torch.arange(my_visualizer.num_prototypes).repeat(num_markers_per_type)
# Play the simulator
sim.reset()
# Now we are ready!
print("[INFO]: Setup complete...")
# Yaw angle
yaw = torch.zeros_like(marker_locations[:, 0])
# Simulate physics
while simulation_app.is_running():
# rotate the markers around the z-axis for visualization
marker_orientations = quat_from_angle_axis(yaw, torch.tensor([0.0, 0.0, 1.0]))
# visualize
my_visualizer.visualize(marker_locations, marker_orientations, marker_indices=marker_indices)
# roll corresponding indices to show how marker prototype can be changed
if yaw[0].item() % (0.5 * torch.pi) < 0.01:
marker_indices = torch.roll(marker_indices, 1)
# perform step
sim.step()
# increment yaw
yaw += 0.01
if __name__ == "__main__":
# run the main function
main()
# close sim app
simulation_app.close()
|