URDFの出力
Fusion360からURDFの出力
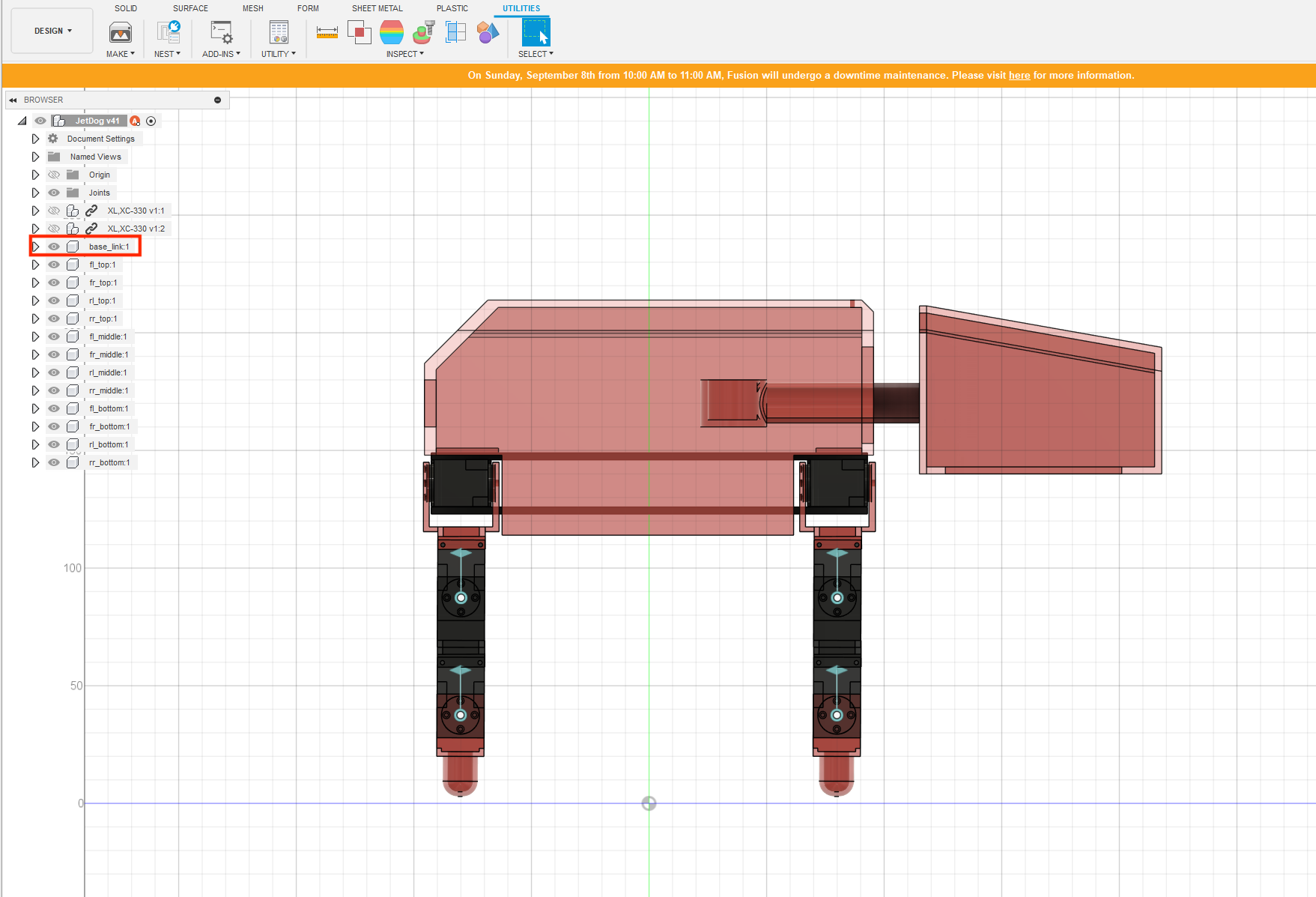
base_linkは必須
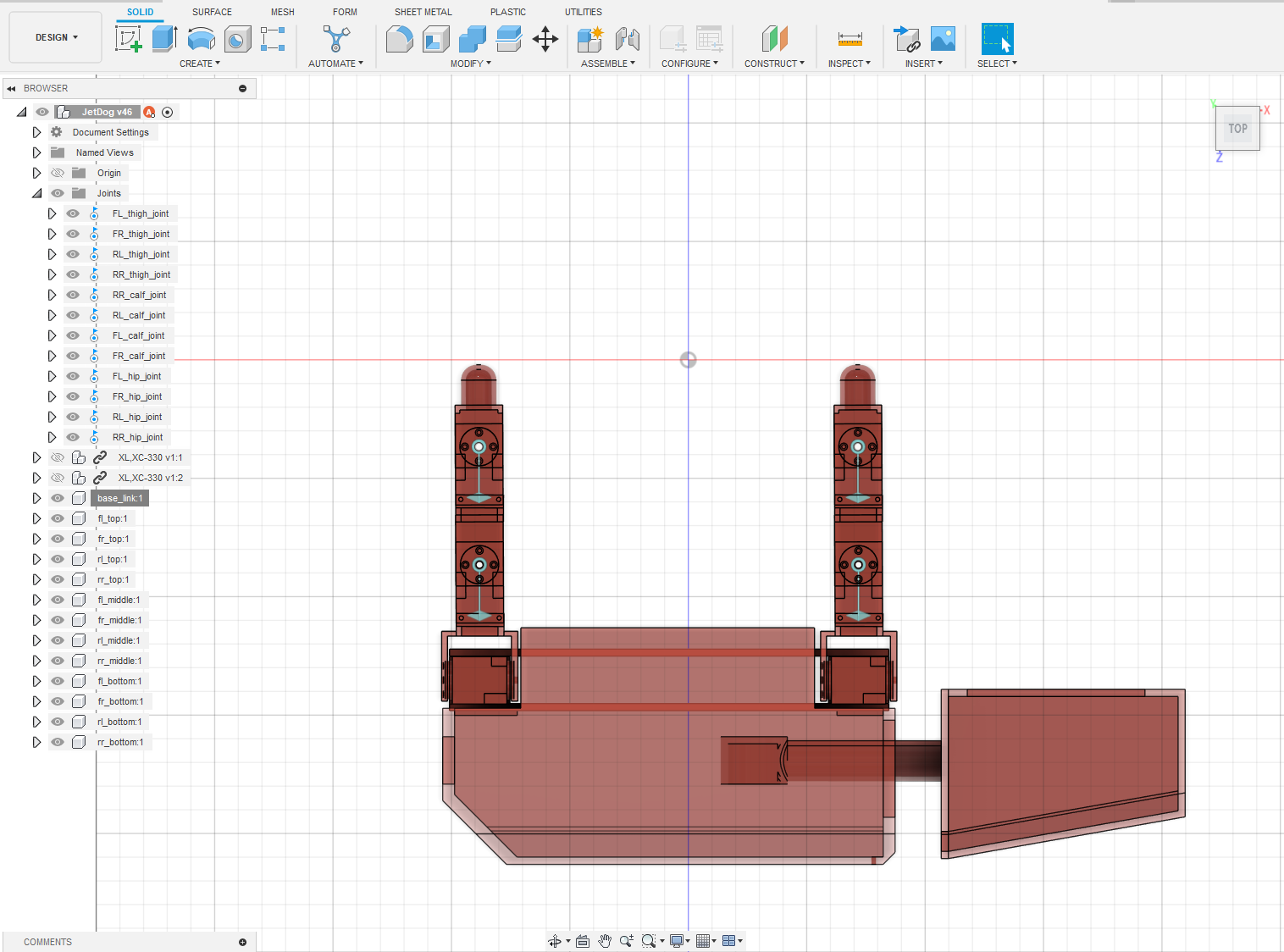
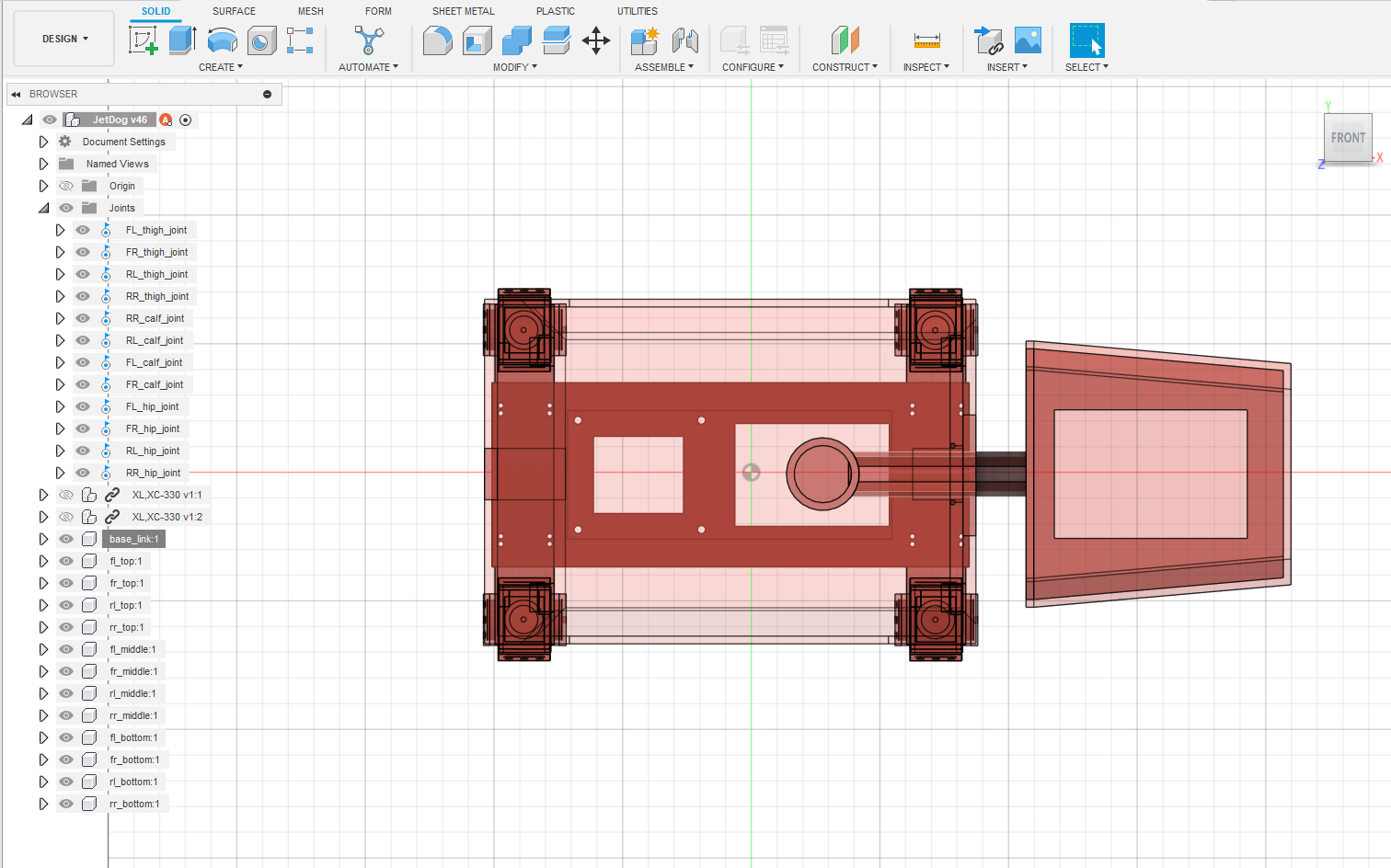
Fusion360の座標軸と変換後のUSDの座標軸をわせるために、下記向きで調整する
Fusion360に、 https://github.com/syuntoku14/fusion2urdf を事前にいれておく
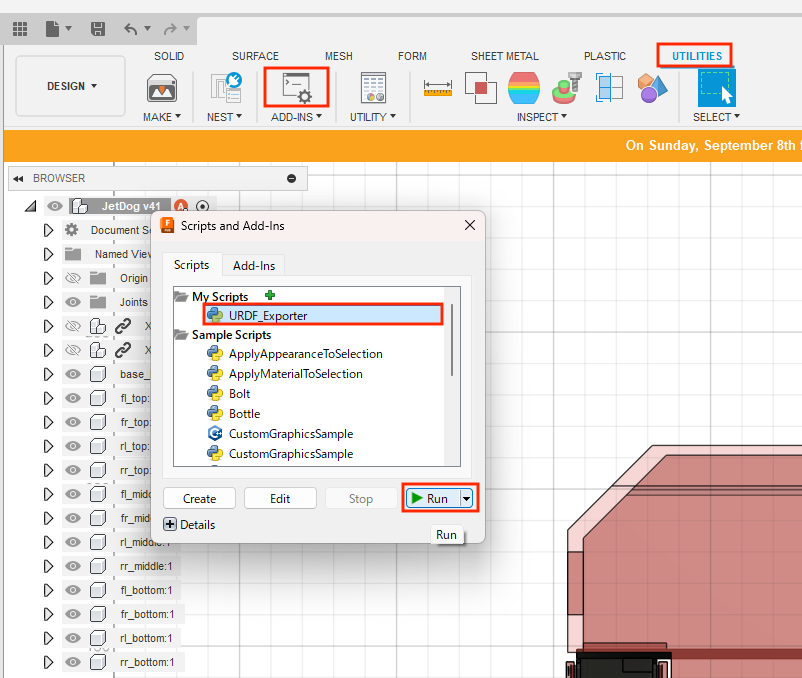
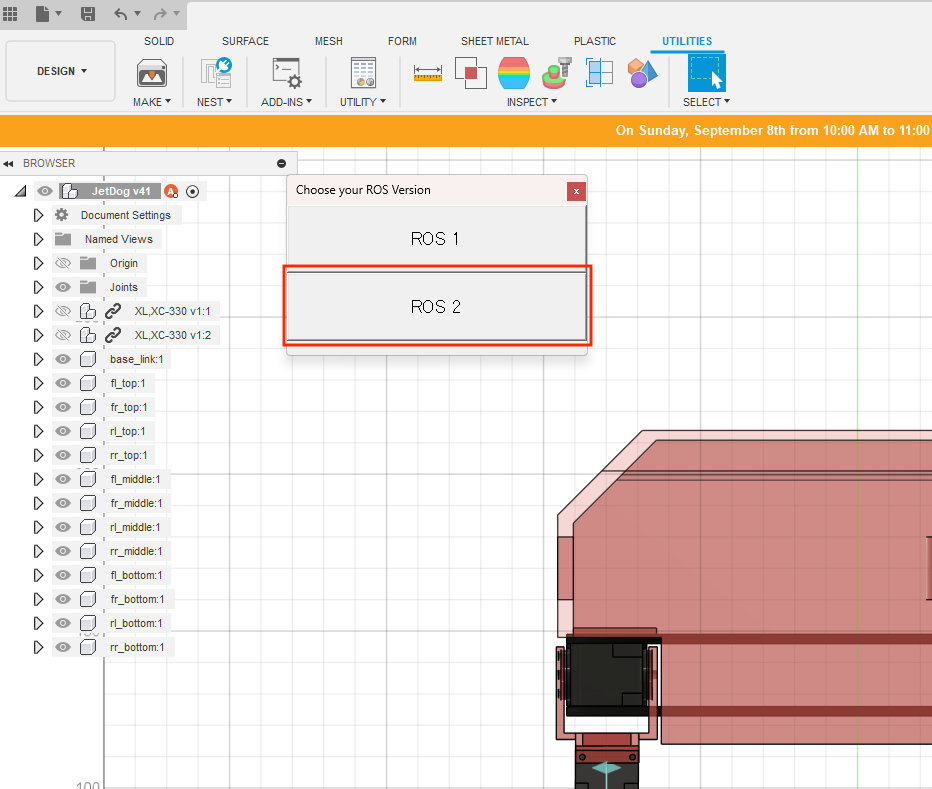
ROS2形式で出力
ROS2でURDFに変換
Fusion360からはXacro形式で出力されるので、ROS2(Foxy)でURDF形式で出力する。
1 2 | |
base_linkは必須
Fusion360の座標軸と変換後のUSDの座標軸をわせるために、下記向きで調整する
Fusion360に、 https://github.com/syuntoku14/fusion2urdf を事前にいれておく
ROS2形式で出力
Fusion360からはXacro形式で出力されるので、ROS2(Foxy)でURDF形式で出力する。
1 2 | |