2.Datasetの作成
境界線や障害物を認識されるために「blocked」ラベルの30枚+「free」ラベルの30枚(合計 60枚)のデータセットを作成します。
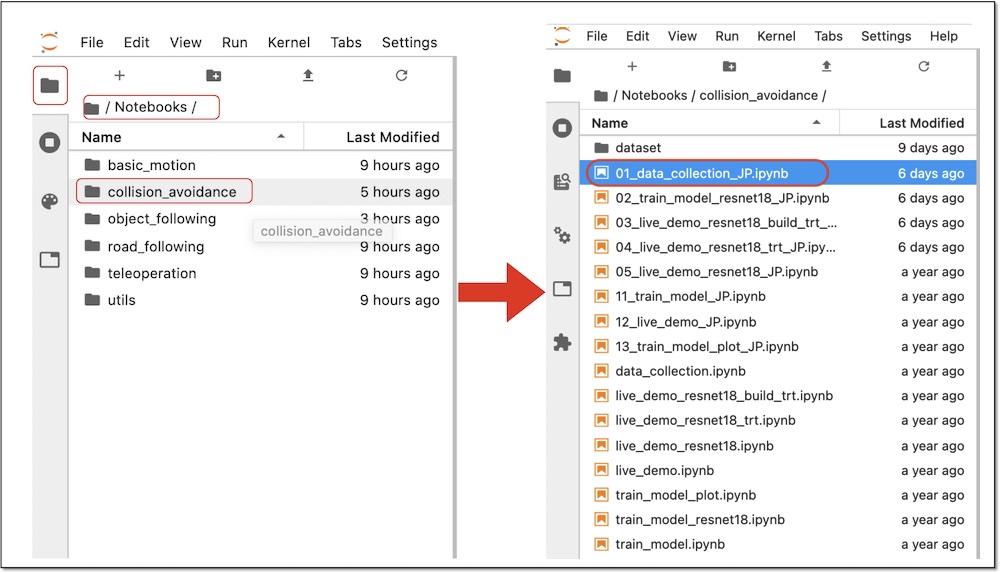
データ収集(01_data_collection_JP.ipynb)
Jupyter上で、~/Notebooks/collision_avoidance/01_data_collection_JP.ipynbを開きます。
「~」はチルダと呼び、ホームディレクトリ(/home/jetbot)のことを指します。
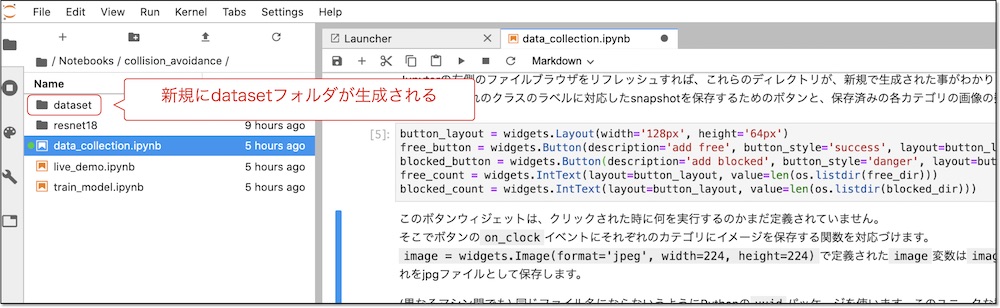
Jupyterを実行していくと、datasetディレクトリが生成され、その下に「blocked」と「free」に分類して画像が保存されます。
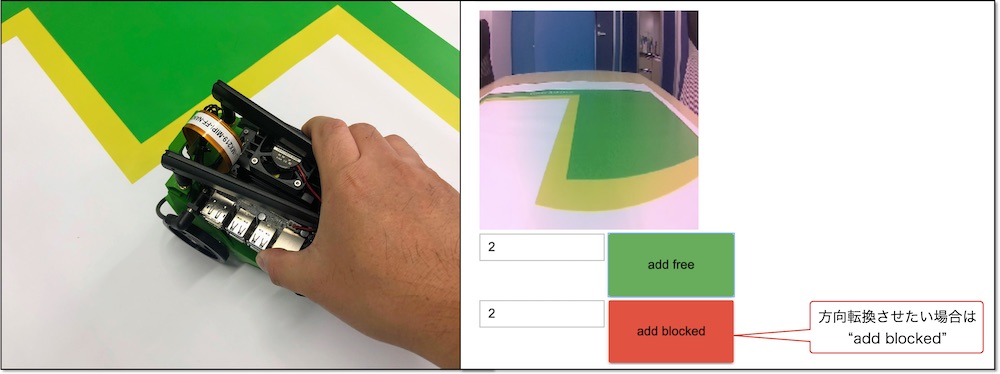
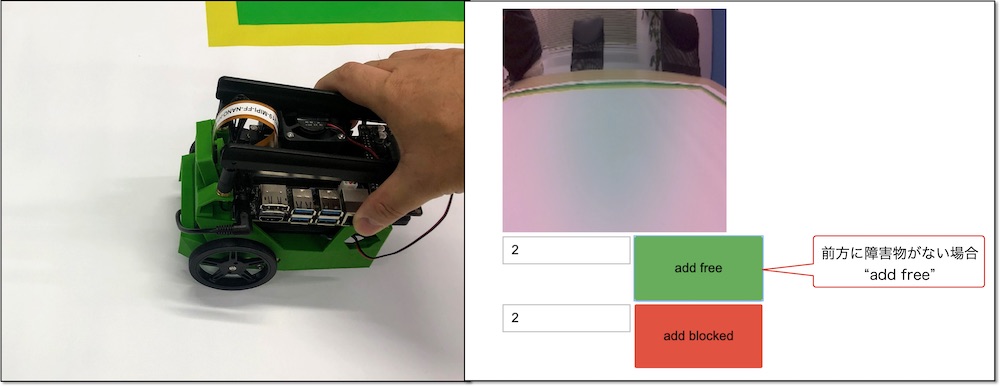
JetBotを回転させたい時は「blockedに保存」、そのまま走行されたい時は「freeに保存」をクリックすることでデータセットが作成されます。
blockedに保存
前方に境界線や障害物がある場合は「blockedに保存」ボタンをクリックします。
freeに保存
前方に境界線や障害物がない場合は「freeに保存」ボタンをクリックします。
実行ログの消去
Jupyterノートブックは実行ログも保存されます。
カメラエラーの発生時に再起動をおこなう場合があります。
再実行時に前回の実行ログが残ったままだと、今どこを実行しているのかわからなくなるため、ログを消去しておくことをお勧めします。
ログの消去はJupyterカーネルも終了するため、再起動直後、もしくは実行後であればカメラ停止後におこなってください。
実行中にエラーが発生!
カメラ停止は実行済みです。
実行番号と出力を消去したいとおもいます。
![]()
Jupyterメニューの「Kernel」->「Restart Kernel and Clear All Outputs...」を選択。
![]()
選択肢が表示されるので、「Restart」をクリックします。
![]()
実行番号と出力が消去されました。この状態で保存しておくと、次回実行時に迷わず実行できます。
![]()