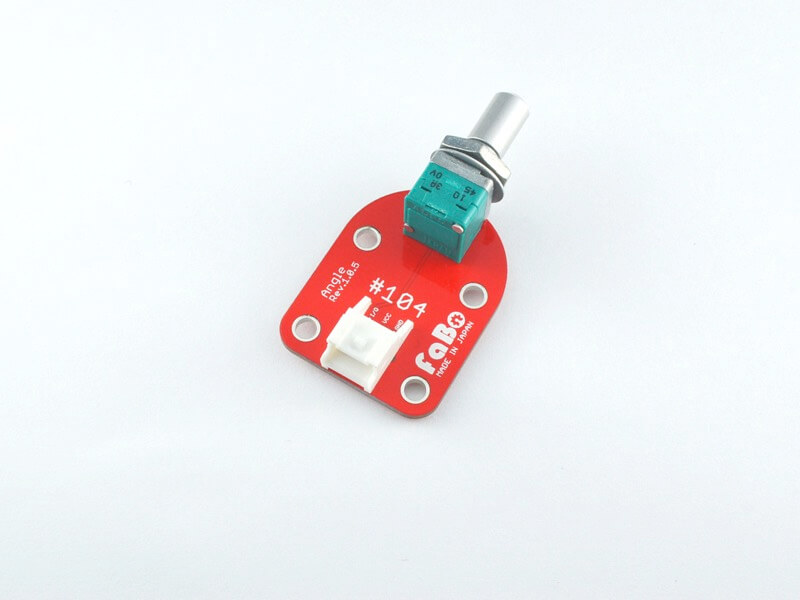
#104 Angle Brick
Overview
ボリューム抵抗を使ったBrickです。
I/Oピンからアナログ値を取得することができます。
LED Brickの明るさを調節する際などに使用します。
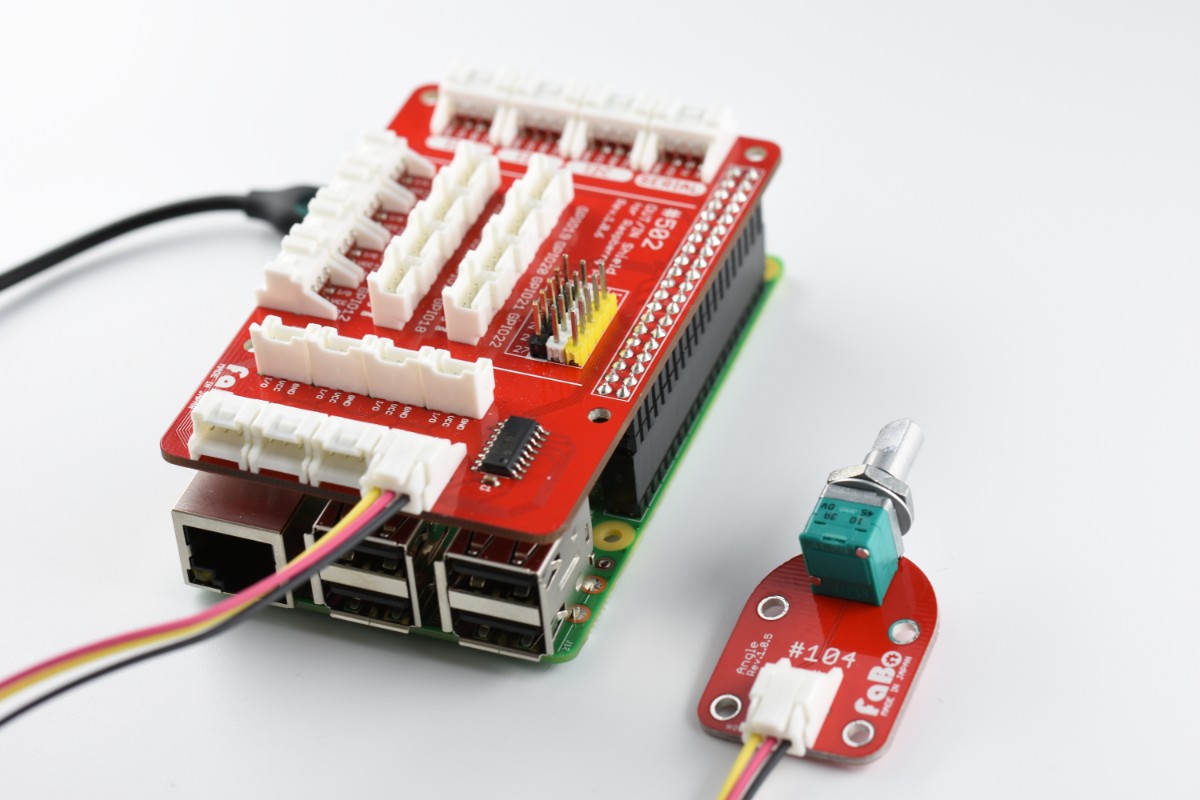
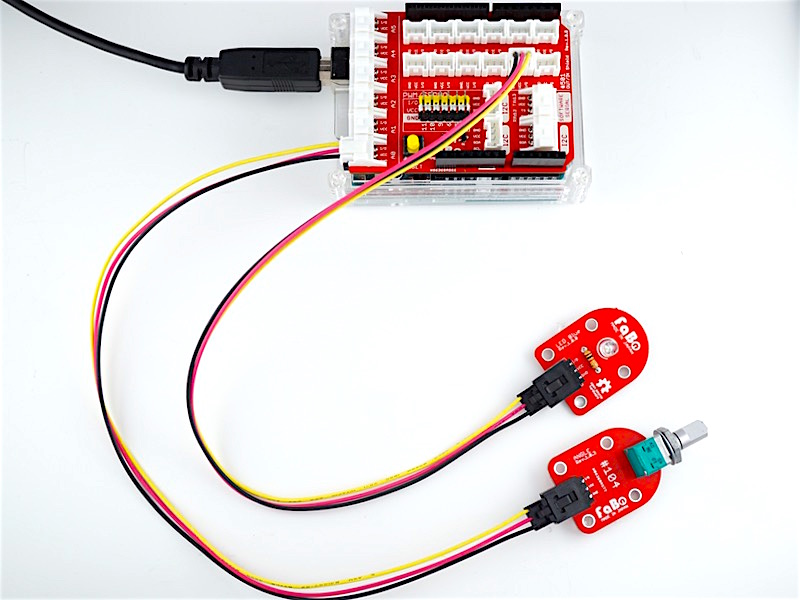
接続
アナログコネクタ(A0〜A7)のいずれかに接続します。
Raspberr Pi
Arduino
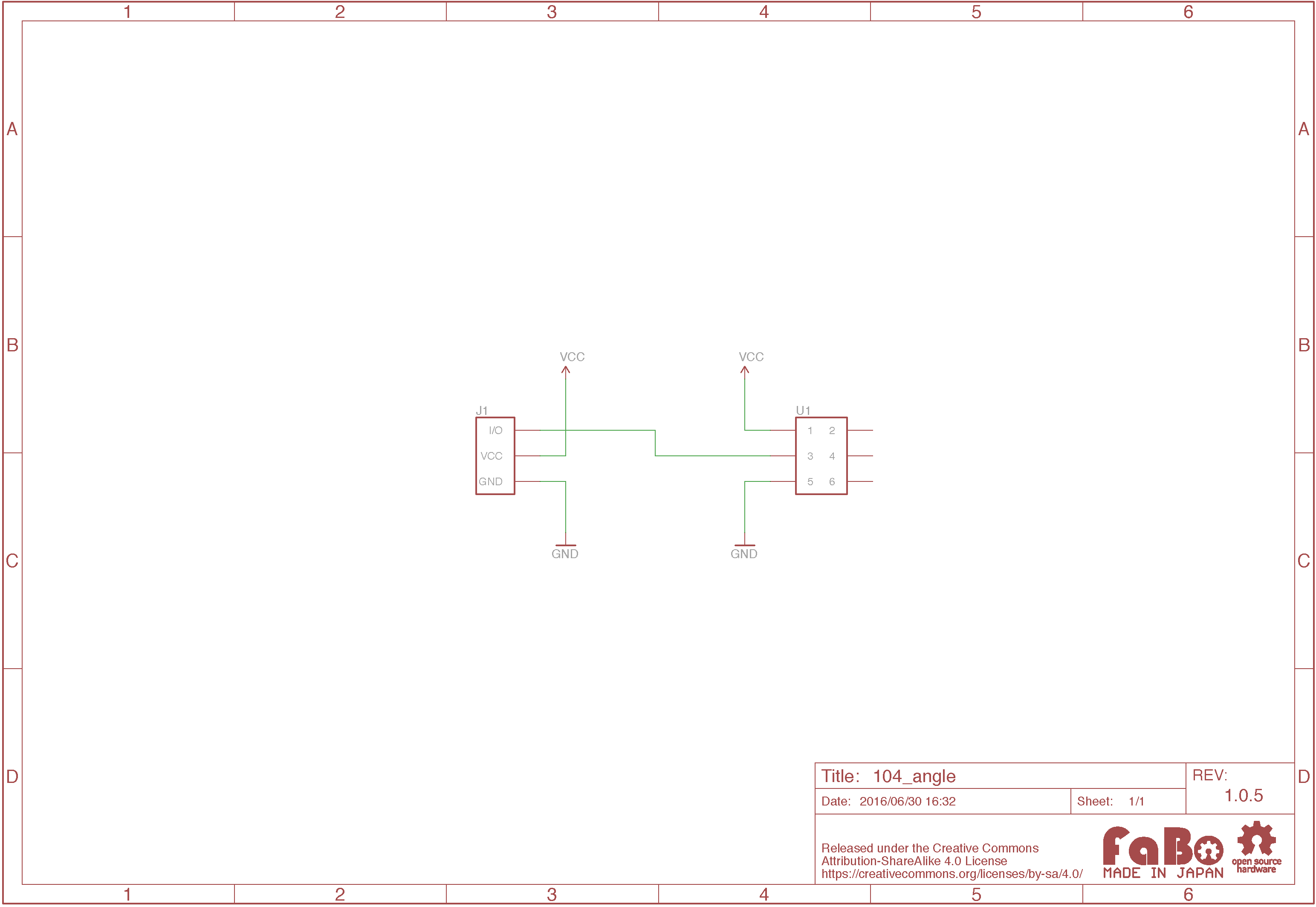
Schematic
Sample Code
A0コネクタにAngle Brickを接続して、D3コネクタに接続したLED Brickの明るさ調節に使用しています。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60 | # coding: utf-8
import RPi.GPIO as GPIO
import spidev
import time
import sys
# A0コネクタにAngleを接続
ANGLEPIN = 0
# GPIO4コネクタにLEDを接続
LEDPIN = 4
#######################################################################
def readadc(channel):
"""
Analog Data Converterの値を読み込む
@channel チャンネル番号
"""
adc = spi.xfer2([1,(8+channel)<<4,0])
data = ((adc[1]&3) << 8) + adc[2]
return data
#######################################################################
def map(x, in_min, in_max, out_min, out_max):
"""
map関数
@x 変換したい値
@in_min 変換前の最小値
@in_max 変換前の最大値
@out_min 変換後の最小
@out_max 変換後の最大値
@return 変換された値
"""
return (x - in_min) * (out_max - out_min) // (in_max - in_min) + out_min
# GPIOポートを設定
GPIO.setmode( GPIO.BCM )
GPIO.setup( LEDPIN, GPIO.OUT )
# PWM/100Hzに設定
LED = GPIO.PWM(LEDPIN, 100)
# 初期化
LED.start(0)
spi = spidev.SpiDev()
spi.open(0,0)
spi.max_speed_hz = 5000
try:
while True:
data = readadc(ANGLEPIN)
print("adc : {:8} ".format(data))
value = map(data, 0, 1023, 0, 100)
LED.ChangeDutyCycle(value)
time.sleep( 0.01 )
except KeyboardInterrupt:
LED.stop()
GPIO.cleanup()
spi.close()
sys.exit(0)
|
構成Parts
GitHub
- https://github.com/FaBoPlatform/FaBo/tree/master/104_angle
{kind=link}