Hokuyo
ROSのインストール
Jetpack 4.3対応のROSのインストール
1 2 3 | |
ワークスペースの作成
1 2 3 | |
URG Nodeのインストール
urg nodeのmake
1 2 3 | |
Jetson NXのeth0を固定IPに
/etc/network/interfaces
1 2 3 4 | |
実行
rosの起動
1 | |
urb nodeの起動
1 | |
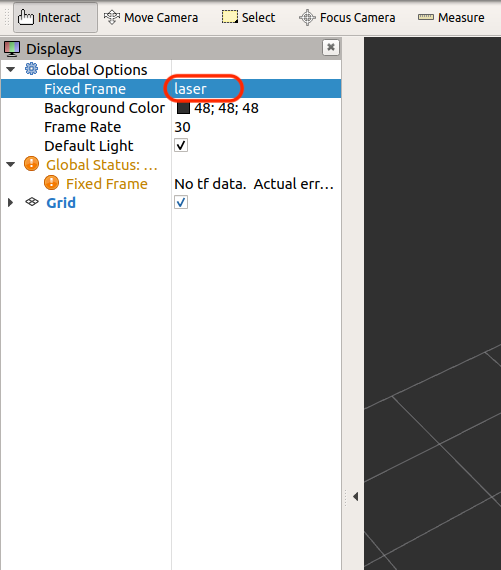
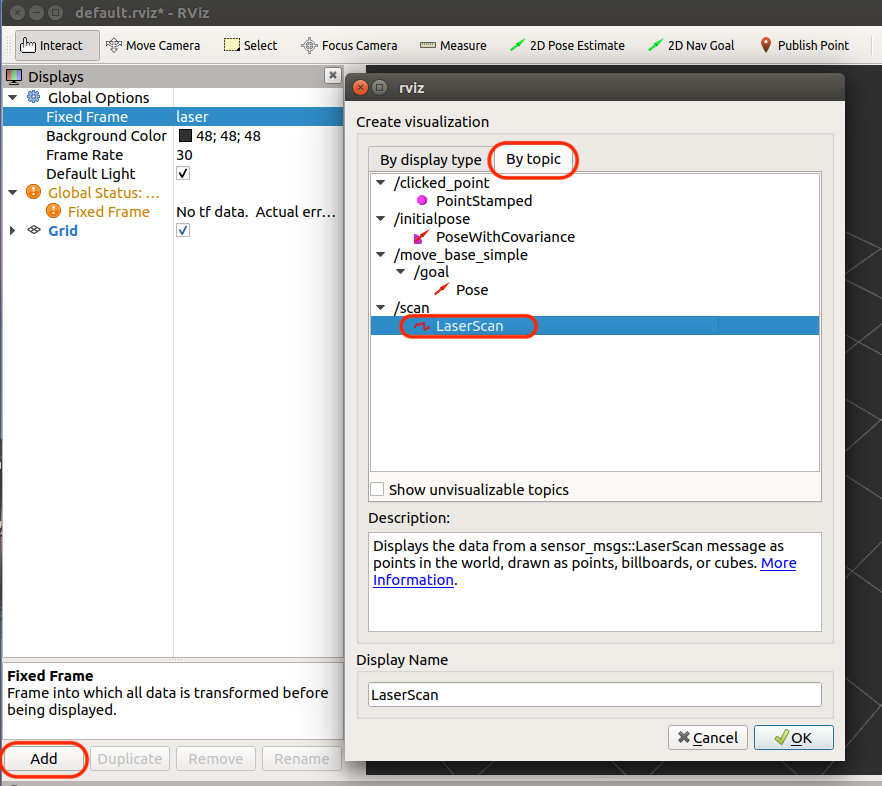
rvizの起動
1 | |
設定
Jetpack 4.3対応のROSのインストール
1 2 3 | |
ワークスペースの作成
1 2 3 | |
urg nodeのmake
1 2 3 | |
/etc/network/interfaces
1 2 3 4 | |
rosの起動
1 | |
urb nodeの起動
1 | |
rvizの起動
1 | |